3.1. 使用联机跟踪功能时的机器人动作
3.1. 使用联机跟踪功能时的机器人动作
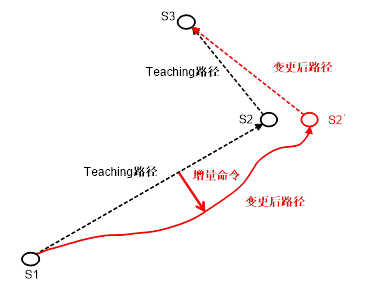
图 3.1 使用联机跟踪功能时的机器人路径变更
图 3.1显示通过联机跟踪功能、机器人路径出现何种变化。使用联机跟踪功能时、达不到启用本功能的OnLTrack ON和OnLTrack OFF命令之间的Step S2地点、而达到任意一个S2' 地点。位置增量命令反映到机器人的动作后加以修改、因此会超出计划的Teaching路径。但关闭OnLTrack后如图3.1所示、从S2'位置出发达到Step S3位置。使用联机跟踪功能时Teaching路径由于增量命令可变更为任意路径、需加以留意。