2.1.3. 设置公用Cube领域的Cube输出入信号
2.1.3. 设置公用Cube领域的Cube输出入信号
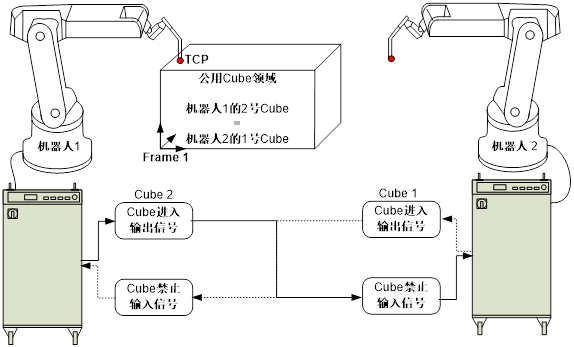
公用Cube领域是各机器人在空间上的同一个领域。因此在设置时首先要准确设置两个机器人的TCP位置、把机器人TCP移动到空间上的同一个位置后设置Cube的位置(参照对角线设置方法、中心点设置方法)以及相同的Cube大小。
公用Cube领域的自动互锁功能
如上图所示、机器人1的Cube进入输出信号与机器人2的Cube禁止输入信号相连接时、机器人1比机器人2先进入公用Cube领域、机器人2会停止等待。
同样、机器人2的Cube进入输出信号与机器人1的Cube禁止输入信号相连接时、机器人2比机器人1先进入公用Cube领域、机器人1会停止等待。