1.1. 多机器人协作功能概要
1.1. 多机器人协作功能概要
“多机器人协作功能”旨在通过利用多台机器人执行仅靠一台机器人无法完成的作业。
该功能可适用于下列情形。
n 需要借助两台带有简单手臂的机器人来协作搬运(Handling)工件时;
n 因工件尺寸过大而仅靠单机器人系统则难以搬运工件时;
n 由主机器人(Master robot)处理工件的过程中,从机器人(Slave robot)在工件上进行电弧焊(Arc weling)或涂胶(Sealing)等无夹具(Jigless)作业时
通过利用该功能,可实现最多4台机器人的协作同步化。
个别机器人在一个程序中既可进行独立作业又可进行协作处理。
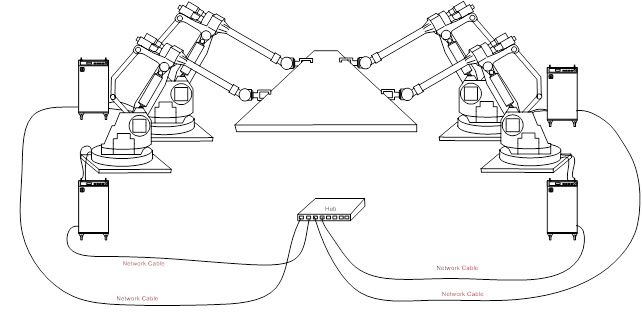
图 1.1 多机器人协作功能