6.1.HiNet I/O概要
6.1.HiNet I/O概要
HiNet I/O功能旨在通过协作控制专用网络共享I/O。各个控制器对协作机器人之间的信号进行监测,因此,只要将设置为“共享”的部分分配到I/O,即可作为输入/输出功能方便使用。各个控制器允许使用的输出(Output)大小为4byte,除了自身的输出部分之外,可接收124byte。与协作控制不同,HiNet I/O不仅在同一群组内,还在连接于HiNet网络的其他群组内,可与最多12台机器人收发信号。

图 6.1 HiNet群组结构
该功能通过机器人语言(HR-BASIC)不仅能检测信号输入/输出,也能作为变量使用,因此,可以按用户需求广泛适用于多个领域。
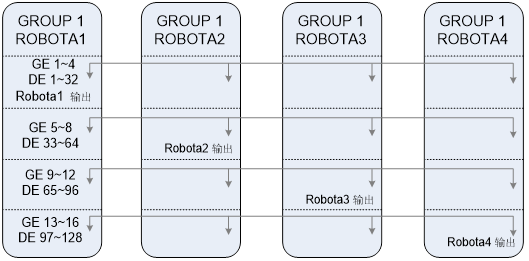
图 6.2 HiNet I/O使用示例(群组1 – 机器人4台)
DE为bit单位的信号。GE是将8个DE信号以byte为单位组成的信号。因此,可以在0~255范围内输入/输出信号。
对于协作控制群组编号,个别机器人控制器的GE信号输出范围如下:
l 最小GE = { (G#-1)X4 + (R#-1) }X4 + 1
l 最大GE = { (G#-1)X4 + (R#-1) }X4 + 4
表 6‑1 按机器人编号分类的输出/输入区域
GE [byte] | G1 R1 | G1 R2 | G1 R3 | G1 R4 | G2 R1 | G2 R2 | G2 R3 | G2 R4 | ... |
1~4 | Out | In | In | In | In | In | In | In | … |
5~8 | In | Out | In | In | In | In | In | In | … |
9~12 | In | In | Out | In | In | In | In | In | … |
13~16 | In | In | In | Out | In | In | In | In | … |
17~20 | In | In | In | In | Out | In | In | In | … |
21~24 | In | In | In | In | In | Out | In | In | … |
25~28 | In | In | In | In | In | In | Out | In | … |
29~32 | In | In | In | In | In | In | In | Out | … |
… | … | … | … | … | ... | … | … | … | … |
l