2.3. 示例程序
2.3. 示例程序
倒角(Chamfering)作业
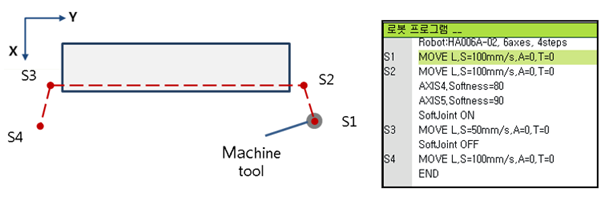
机器人运动 | § 从S1移动到加工起始点S2。 § 打开SoftJoint功能后移动S3而执行倒角作业。 § 关闭SoftJoint功能后移动到S4。 |
位置记录(S2~S3) | SoftJoint是一种被外力滑移的功能,为了有效施压于工件,就需要将示教点置于工件内侧。 |
Axis.Softness | § Softness值应基于作业方向、工件材料、加工程度的考虑进行设置。 § 如上述示例中,以机器人坐标系为准,向+X方向滑移并向–Y方向移动, 因此,在R2轴与B轴上设置Softness。 |