4.5. Press同步Teaching
4.5. Press同步Teaching
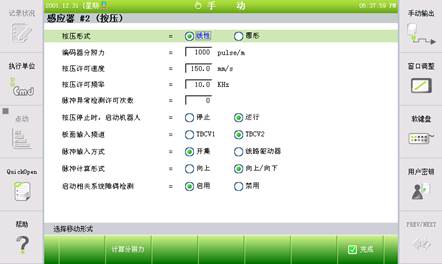
Press同步是随着Press的速度机器人同步作业。假设Press的速度始终固定、Press的速度可变时同步性能就会降低。当前运行的Press速度在上述菜单下设定为Press容许速度。
以下是Press运行程序的例示。
Step 1 SensorSync Sensor=1、Sync=1 WaitSensor Sensor=1、Sync=0、Pos=500 Step 2 MOVE P、S=60% Step 3 MOVE P、S=60% Step 4 MOVE P、S=60% SensorSync Sensor=1、Sync=0 Step 5 END |
→ Press同步运行ON → Press Interlock等待 à 登录传感器1的位置 à 登录传感器1的位置 à 登录传感器1的位置 → Press同步运行OFF
|
在上述程序中Step 2、3、4中的传感器位置必须以增加方式进行Teaching、如不然会出现如下错误。
E0239 分步感应器位置不按次序增加
且Step2、3、4所记录的速度被忽略、基本上以用户指定的Press的容许速度为基础计划速度。即使以最高速计划、如果传感器和机器人的位置记录超出机器人的性能、就会出现如下错误。
E0238无法跟踪感应器速度