2.3.2. 通信方法
2.3.2. 通信方法
以PC为server、机器人控制器为client进行UDP/IP通信、通信周期是5msec。控制器的主板提供3个网络端口(EN0、EN1、EN2)、但PC要与在EN2设置的IP地址和端口号=6001进行通信。(有关EN2的IP地址等的设置请参照'Hi5控制器操作说明书'的网络篇) PC的IP地址和端口号应与OnLTrack ON命令上设置的值相同、PC和控制器应交叉连接以太网线。为进行PC和控制器的数据收发应按照通信顺序收发Command变量。图 3.1是显示PC和控制器之间的通信顺序和收发的Command变量。
① 在PC进行UDP/IP通信初始化及等待连接 ② 在控制器运行OnLTrack ON指令时向PC发送开始通知(Command='S') ③ PC接收开始通知后向控制器发送连接确认(Command='S') ④ 在PC计算位置增量命令后发送到控制器(Command='P') ⑤ 控制器接收和反映位置增量命令后发送机器人的当前位置(Command='P') ⑥ 反复④、⑤后运行OnLTrack OFF指令时向PC发送结束通知(Command='F') |
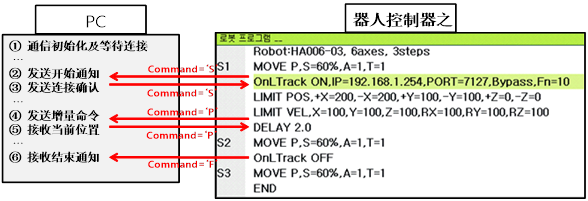
图 2.1 PC和机器人控制器之间的通信顺序
以PC为server、机器人控制器为Client进行UDP/IP通信。Client即机器人控制器如图 3.1所示、在运行机器人程序后根据OnLTrack ON、OFF指令自动与server即PC形成通信或结束通信、从而启动联机跟踪功能。且PC和机器人控制器之间的通信周期为5msec、如果控制器在5msec内接收2个以上的数据时只适用最近接收的数据、会忽略之前接收到的数据、因此PC发送数据时应多加留意。