4.3. PROFINET IO-Controller设置
4.3. PROFINET IO-Controller设置
请按如下程序进行机器人控制器的PROFINET IO-Controller设置。
(1) 选择『[F2]: 系统』 → 『2: 控制参数』 → 『2: 输入/输出信号设置』 → 『14: 实时以太网设定和诊断』项目。
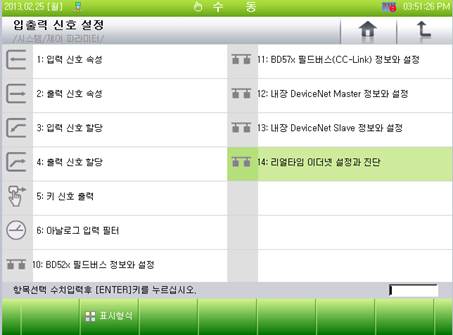
图 4.2 实时以太网设置和诊断菜单
(2) PROFINET IO-Controller相当于1号Channel、用『[F3]:上一级屏幕』或『[F4]:下一屏幕』键来移动到1号Channel以确认装置时间是否显示“PROFINET IO-Controller”。
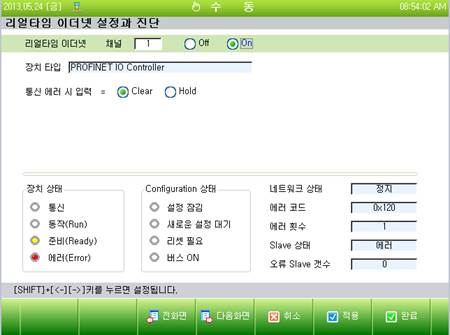
图 4.3 PROFINET IO-Controller设置画面
(3) 通信错误时可选择输入选项。发生PROFINET IO通信错误时、把输入数据(FB1.X)的处理选项设置为Clear时、在发生通信错误时即可把所有输入数据清为零、相反、设置为Hold时、当发生 通信错误即保持最后的有效值。
(4) 使用PROFINET IO-Controller功能时把功能置于[On]位置后点击“应用”或“完成”键。