3.1. 特殊事项
3.1. 特殊事项
(1) 对外力反应最敏感的方向是机器人坐标系的左右方向(±Y)。在进行Servo Free作业时建议把机器人设置为机器人工具以机器人坐标系的+Y或-Y方向推动。
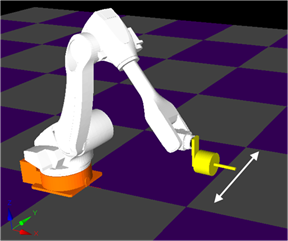
图 3.1 Servo Free推荐方向
(2) 机器人移动到特定Step后立即启用Servo Free功能时、外力预测误差可能会变大。在激活Servo Free功能之前、宜输入2秒左右的延时(DELAY 2.0)设置。
(3) 设置最大推动速度时应大于或等于推动机器人的速度。最大推动速度小于推动机器人的速度时会给机器人施加过度的外力、从而造成机器破损。最大推动速度可设置到300mm/s。
(4) 在推动到最大推动距离之后仍然推机器人工具时会给机器人施加过度的外力、从而造成机器破损。因此设置最大推动距离时要大于实际推动机器人工具的距离。最大推动距离可设置到1,000mm。
(5) 由于工具重量误差等原因、外力消失后机器人工具有可能被持续推动、随之也会造成机器人工具和周边设备的冲撞。可通过合理设置最大推动距离、在外力消失后令机器人工具移动一定距离后自动停止。
(6) Servo Free Teaching程序使用的工具号的负荷信息应输入抓爪器和用抓爪器操作的workpiece在内的信息。如难以手动输入准确的负荷信息、建议使用'负荷预测'功能。