1.10.1. 安全电路的运转
1.10.1. 安全电路的运转
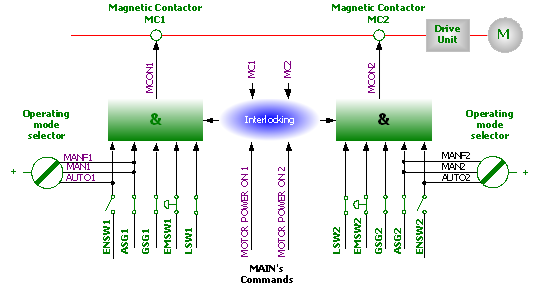
图 1.5 安全链结构图
机器人的安全系统由持续监控其状态的双重安全电路构成。如果感知错误、就会即时关闭电机电源、并启动电机制动器。若想转换到电机启动状态、须连接所有双重电路的开关。如果安全电路的双重开关中的任何一个被断线、电机的接触端子就会断线、而且制动器会启动、机器人会停止。并且、如果安全电路被断线、就会向控制器发送中断呼叫、以确认中断原因。
安全控制电路根据控制器与电机启动模式相互作用的双重安全电路进行工作。若想让机器人处于电机启动模式、应连接由几个开关连接组成的所有安全电路、电机启动模式表示向电机供应驱动电流。如果安全电路的任何接触点被断开、机器人会转回电机关闭模式、电机关闭模式表示驱动电流没有供应到机器人电机、处于电机制动器被启动的状态。开关状态会显示于示教盒(Teach Pendant)。(参考操作说明书“I/O监控”画面)。
安全电路
安全电路包括有控制器操作板和示教盒(Teach Pendant)上的紧急停止按钮和安装在外部设备的紧急停止按钮。在自动操作模式工作的安全装置(安全门闩、安全区域禁入装置等)可由用户安装。在手动操作模式中安全装置信号会被忽视。安全停止装置(所有安全停止装置) 可由用户直接连接、并且可适用于所有工作模式。即、在自动操作模式中所有安全装置(门、安全垫、安全门闩等)都会工作、因此任何人都不得进入机器人的安全区域内。在手动操作中也会形成这些信号模式、但是控制器为了示教(Teaching)机器人而忽视这些信号、使之机器人继续操作。这时、机器人的最大速度会限制为250mm/s。即、这些安全停止装置的功能是当工作人员为维护、示教(Teaching)机器人而接近机器人时、在机体周围确保安全的区域。
通过限制开关停止机器人后、可在正数设置模式通过示教盒(Teach Pendant)的操作键(key)移动机器人来变换位置。(正数设置模式是指“在手动模式进入『[F2]:系统』”菜单的状态。)
| 在任何情况下,不得忽视或修改或变更安全电路。 |
