7.2.5. 原始位置记录
7.2.5. 原始位置记录
这是用户把任意姿势注册为原始位置、机器人进入该位置的时候在输出信号栏输出设置的原始位置信号的功能。按各轴姿势指定原始位置、此处可设置各轴的边界。
最多可以注册和使用8个原始位置。
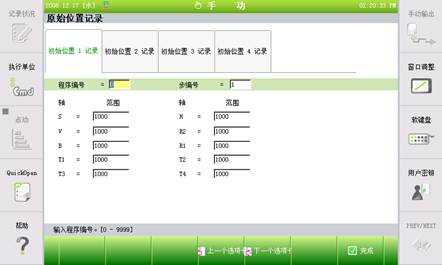
n 轴角度和范围
输入原始位置的机器人轴角度和范围。若范围值设置为0的话、对于该轴没有执行原始位置检查。
范围值使用原始位置点的‘+’方向和‘-’方向的范围。例如、设置0.5的话、原始位置信号的输出范围是1。
l [F1:现在机器人姿势]
这是在画面自动输入现在机器人姿势的轴角度值的功能。
l [F2:程序/步]
这是用户输入程序和步编号后在画面自动输入步的轴角度值的功能。