7.2.6. 移位极限
7.2.6. 移位极限
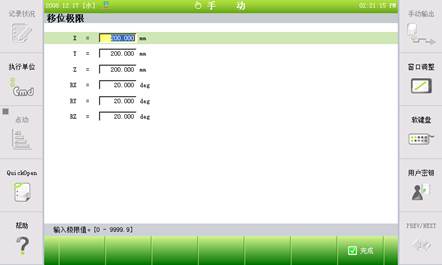
本功能用于设置机器人的位移限制、在使用位移功能时提高机器人的稳定性。设置对XYZ位移或在线位移功能的位移限制、当位移超过此设置时就会生成一个错误信号提示。
通过设置位移限制、可在从外部收到不正确的位移数据时、对错误加以处理。
本功能用于设置机器人的位移限制、在使用位移功能时提高机器人的稳定性。设置对XYZ位移或在线位移功能的位移限制、当位移超过此设置时就会生成一个错误信号提示。
通过设置位移限制、可在从外部收到不正确的位移数据时、对错误加以处理。