7.6.1. 轴常数和工具长度优化
7.6.1. 轴常数和工具长度优化
这是不使用外部测定感应器而校准机器人的各轴原点和工具长度的功能。由于利用这一功能的话编码器选项和工具长度被变更、原有示教的程序工作位置也有变化、因此开始工作之前必须执行校准。
以示教方法为例、正如下图准备两个尖端Tip后一个固定在外部、另一个固定在工具后对于外部固定的Tip通过改变机器人工具末端姿势的方法、利用几个点机器人程序记录。
这时寻找轴常数和工具长度的话示教7点、只寻找工具长度的话应示教4点以上。
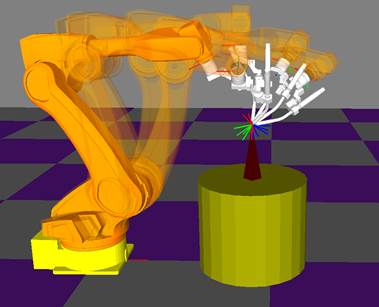
图 7.60 轴常数和工具长度的最优化功能示教方法
使用此功能除了没有CAD数据的工具长度X、Y、Z以外还利用最优化方法找到机器人H、V、R2、B轴的原点。
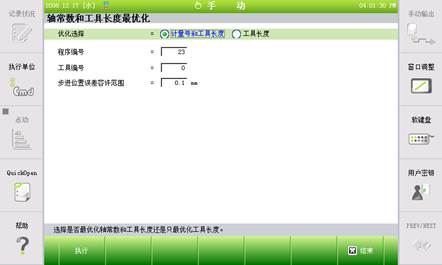
图 7.61 轴常数和工具长度最优化结果
n 优化选择
① 计量号和工具长度
- 自动计算原来要在『[F2]:系统』→『3:机器人参数』→『1:工具数据』设置的工具长度和在『[F2]:系统』→『3:机器人参数』→『2:轴常数』设置的机器人原点。
- 校准机器人原点和工具长度的时候选择。一般而言、安装机器人后最初设置正确的原点时使用。
- 一旦正确设置机器人原点的话、将最优化选择方法选择为“工具长度”后只校准工具长度。变更“轴常数和工具长度”的话、由于变更所有机器人的原点、原有编写的程序位置也有变化、因此注意以下。
② 工具长度
- 『[F2]:系统』→『3:机器人参数』→『1:工具数据』里设置的工具长度来调整设置值。
n 程序编号:用来设置在各个位置记录了相同点的程序编号。
n 工具编号
此工具编号用来进行自动设置、必须与记录在用于设置的程序里的工具编号相同。
n 步进位置误差容许范围
根据自动常数设置结果、预测的误差小于这个设定值的话、自动更新常数数据。如果大于这个设定值(初期设定值为0.1mm)的话、向用户确定是否反映常数后反映。

l 在此功能示教的正确度与最大步位置误差结果的正确度成正比。因此、需要尽可能准备尖端的两个Tip后把两个正确相一致的示教工作。肉眼确认时工具末端和空固定点相一致的正确度应在于0.5毫米之内。
l 不应示教与各步的姿势相似的姿势、而示教与以前姿势不同的姿势(其差异应大于30deg)。
l 进行示教、让各步腕(R2、B、R1)的移动尽可能地大、以便得到足够的各步角度差(尽可能地宽)。
l 机械参数文件(ROBOT.MCH)设置为保护的话、无法执行此功能。取消文件保护后再尝试运行。