7.6.9. 机器人和工具校准
7.6.9. 机器人和工具校准
此功能用在利用3维测定器能够测定机器人位置的环境。
(1) 选择在机器人工具末端要测定的位置。采取各种各样的机器人位置和姿势、测定15点以上、这时利用程序记录机器人位置。
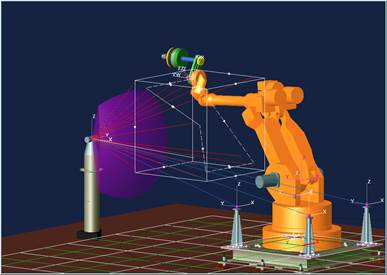
图 7.79 机器人数据的测定方法
(2) 以X、Y、Z形式整理测定点的数据形式、以ASCII文件格式保存、以*.msr扩展名保存。把此文件拷贝到优盘后插入在示教盒。
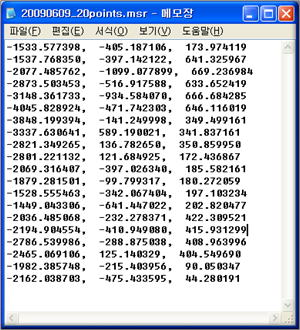
图 7.80 测定的机器人位置数据
(3) 进入机器人和工具校准菜单、利用浏览器[F3]选择该msr文件。
(4) 选择用于测定的机器人程序。
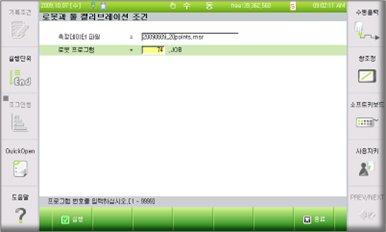
图 7.81 输入机器人校准数据
(5) 下执行[F7]键出现校准画面、在此情况下再次按下执行[F1]键的话、表示校准结果。
(6) 点击完毕[F7]键、表示如下信息。这时选择‘是’的话、在轴常数和工具常数自动适用校准的值。

图 7.82 执行机器人校准的画面
参考) 基本上选择的校准参数为H、V、R2、B轴的轴常数和工具长度X、Y、Z值。若要只执行工具校准的话、解除在各轴表示的复选框后执行即可。