3.7.2. 机器人本体与控制器的连接
3.7.2. 机器人本体与控制器的连接
利用端子线(wire harness)连接机器人本体与控制器。连接时、请逐一确认各个连接器名称。
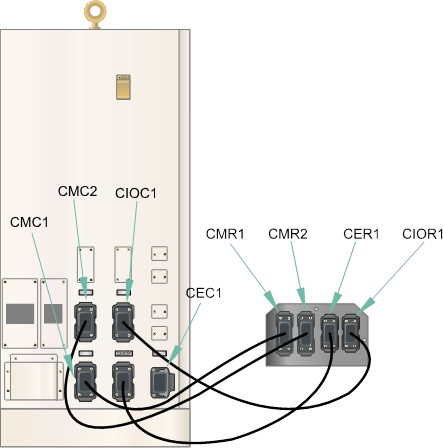
图 3.29 机器人本体与控制器的连接(Hi5a-C3*/C4*/C5*/C6*)
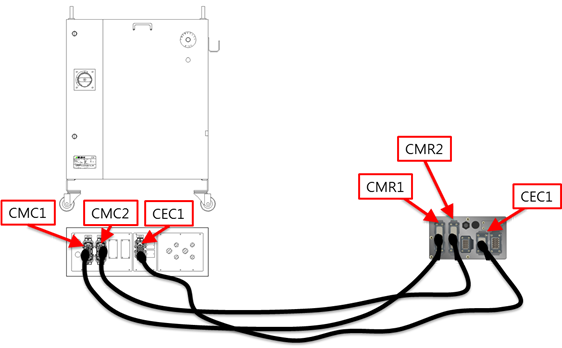
图 3.30 机器人本体与控制器的连接(Hi5a-S00)
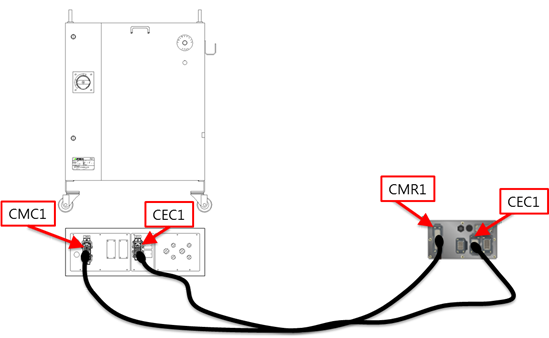
图 3.31 机器人本体与控制器的连接(Hi5a-S30)
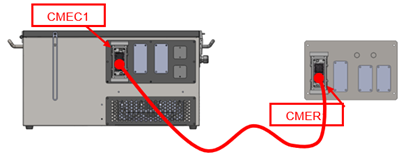
图3.32 机器人本体与控制器的连接(Hi5a-S20/S10)

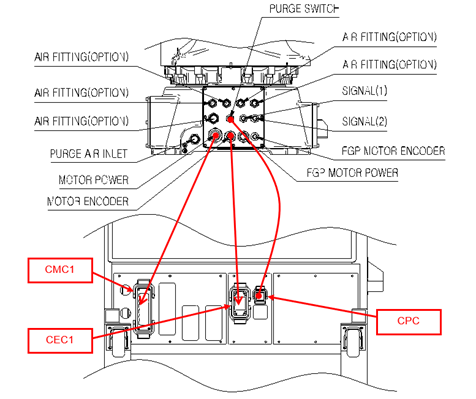
图3.33 机器人本体与控制器的连接(Hi5a-P10/P20)
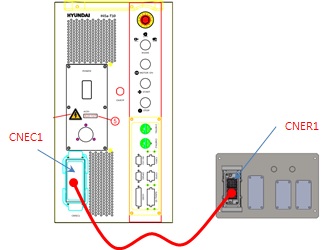
图3.34 机器人本体与控制器的连接(Hi5a-T10)