8.3.3. LVS(Laser Vision Sensor)焊接线跟踪及检测功能
8.3.3. LVS(Laser Vision Sensor)焊接线跟踪及检测功能
利用该功能,用LVS识别焊接线,根据环境检测变更的焊接线并进行跟踪,能供提供稳定的焊接质量。LVS设置在机器人的焊炬附近,识别要焊接的对象,并将有关信息发送给机器人。机器人利用该信息,将机器人的工具末端移动到识别的位置。因此,即使被焊接物位置有变,在原来示教点不能进行焊接,也可以把机器人的工具末端移动到焊接开始点,开始进行焊接。
而且,在焊接中LVS也继续识别焊接线,将其信息发送给机器人,让机器人跟着焊接线正确进行焊接。通过该功能,在被焊接物位置变化频繁或焊接线不均匀,也能够确保较稳定的焊接质量。
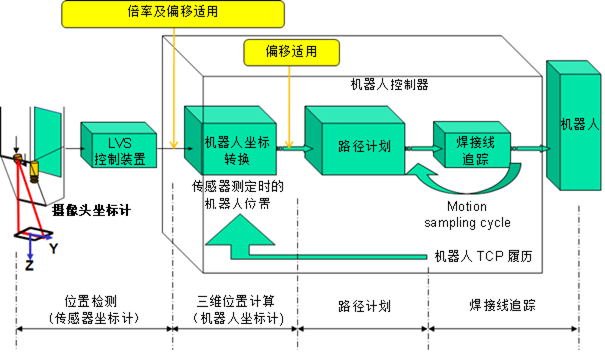
图8.16 LVS焊接线追踪数据流程图
LVS焊接线追踪和检测功能用LVSON指令使用。关于功能的环境设置及具体内容请参考“LVS焊接线追踪及检测功能说明书”。该功能是一种选项功能,需要工程师的帮助,要使用请联系本公司。
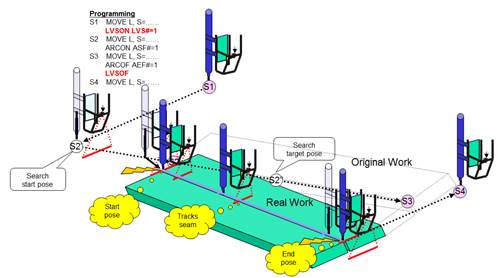
图8.17 LVS焊接线追踪数据流程图