7.2. 操作
7.2. 操作
如下图所示,在一个定位器上由两台机器人同时执行电弧焊时,可使用协作控制电弧焊功能。此时,如果两台机器人不能同时执行焊接,会造成作业不良。
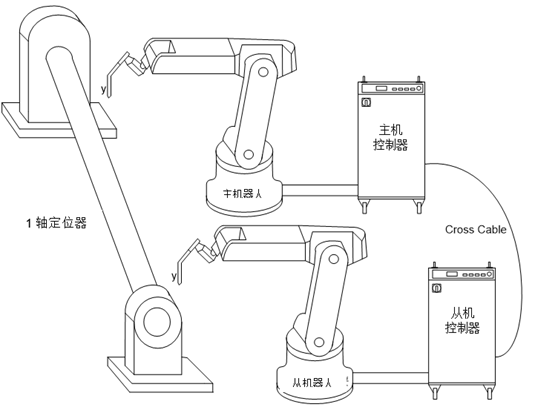
图 7.2 协作控制电弧焊功能的概念图
具体实例如下:
(1) 例如,当主机器人编号为1号,从机器人编号为2号时,主机侧控制器可设置为如下:
n 状态输出端口:GE4(可选择1~4号之一)
n 状态输入端口:GE8(与从机侧状态输出端口成一致)
(2) 从机侧控制器可设置为如下:
n 状态输出端口:GE8(可选择5~8号之一)
n 状态输入端口:GE4(与主机侧状态输出端口成一致)
n 将Remote WCR设置选为“有效”。
(3) 在自动模式下,通过协作控制方式使两台机器人同时执行ARCON。
(4) 如果两台机器人同时成功引燃电弧,定位器及机器人将在执行焊接的过程中移动。
(5) 如果一台机器人无法引燃电弧,另一台机器人也将停止电弧,同时执行重试功能。之后,如果同时成功引燃,就会执行正常移动。
(6) 在执行焊接的过程中,若因停止、错误等原因而造成一台机器人停止弧焊,那么,另一台机器人也会停止弧焊。去除引起错误的原因后重启时,两台机器人将同时执行“Overlap”(重启)功能后,重新进入正式的焊接过程。
(7) 在焊接过程中,若一台机器人通过“ARCOF”指令正常结束焊接,这不会影响其他机器人的弧焊作业。