1. 概要
机器人的零部件发生故障(尤其是电机或减速机)而更换相应部件时、为了启用原示教程序、需要以原来的原点相同的条件补偿编码器。
但AS人员在现场手动进行上述操作时、也会发生经过反复试验才能对准原点的情况。
因而、Hi5a控制器提供能够方便操作的专用功能。
※ 机器修理后原位置复位是?
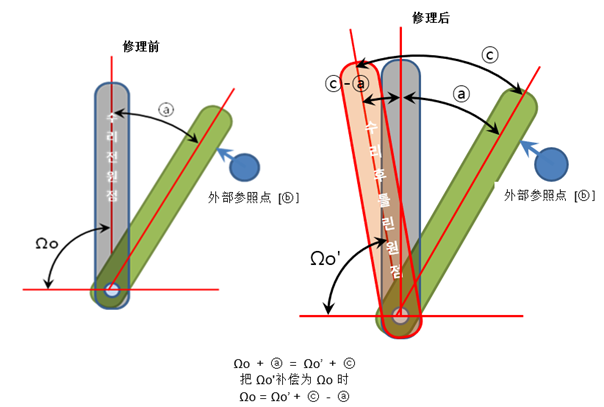
即、原位置复位是
用外部参照点(千分表)更换零部件后用ⓒ-ⓐ值补偿不正确的原点Ωo'(需再使用示教程序)
 注意事项
注意事项
*零部件更换前和更换后不得变更外部参照点**(**ⓑ**)**的位置。也就是说零部件更换前和更换后必须要在同一个位置。*