1.3. 示例程序
1.3. 示例程序
轴孔装配(Peg in hole)作业
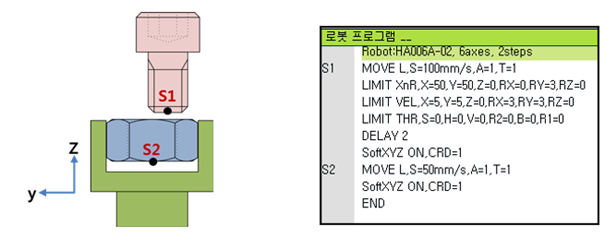
机器人运动 | § 移动到接近于孔的S1 § 打开SoftXYZ功能后,移动到装配完毕点S2 § 装配完后关闭功能 |
位置记录 | § S1:将轴(peg)置于接近孔的位置 § S2:轴孔装配完成的工具末端位置 |
LIMIT设置 | 以所记录的位置为准,区分需要对齐的方向与无需对齐的方向而设置LIMIT。轴孔装配作业(示例)在X、Y、RX、RY方向出现位置误差,从而需要相关方向的力控制。 § XnR:设置向X、Y、RX、RY方向作业所需的移动距离。 向Z、RZ方向设置为0,以免受外扰。 § VEL:设置向X、Y、RX、RY方向力控制所需的最大速度。 向Z、RZ方向设置为0,以免受外扰。 § THR:设置每个轴的阈值,防止机器人因受多余外扰而运动。 值越大,灵敏度越低,从而需要设置最小值。 |