1.1. 系统构成
1.1. 系统构成
传送装置和Press同步系统的一般构成形态如下图。
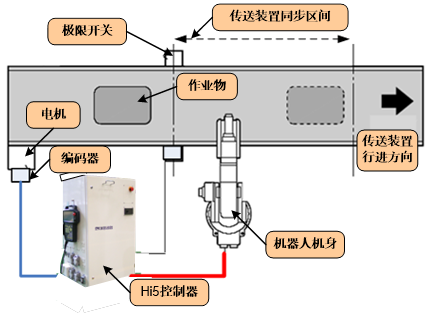
n 极限开关
是通知控制器作业物已到达传送装置上的特定位置或Press通过特定位置的装置。极限开关所在位置就是判断位置的基准点。
n 编码器
电机驱动装置上连接编码器、能够发生相当于电机旋转量的脉冲。且这一编码器与机器人控制器相连接、把编码器输出的脉冲输入到机器人控制器。
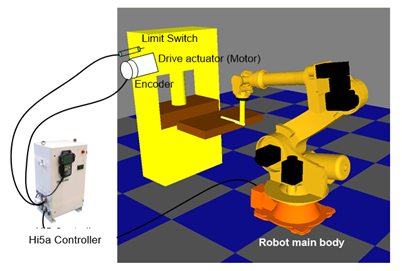
传送装置和Press同步系统的一般构成形态如下图。
n 极限开关
是通知控制器作业物已到达传送装置上的特定位置或Press通过特定位置的装置。极限开关所在位置就是判断位置的基准点。
n 编码器
电机驱动装置上连接编码器、能够发生相当于电机旋转量的脉冲。且这一编码器与机器人控制器相连接、把编码器输出的脉冲输入到机器人控制器。