1. 概要
1.1.什么是更换多用(伺服)工具?
指对于安装有伺服电机的两个以上的刀具(夹具、定位器、伺服枪)、利用刀具更换器(ATC)机器人自动更换刀具的行为。
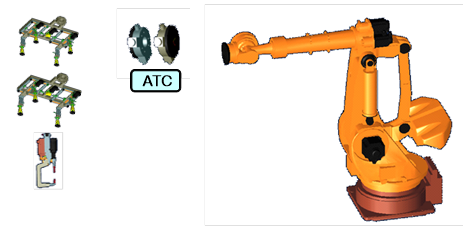
图 1.1 伺服工具和机器人
本说明书以如下系统为基础进行说明。现场系统不可能与此相同、现场作业人员应参考本说明书内容、根据其现场的系统准确使用。
说明书使用的系统配置
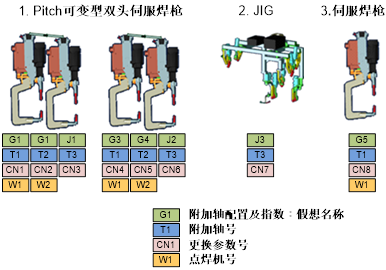
图 1.2 说明书中使用的伺服工具的种类
必备说明书
(1) Hi5a控制器操作说明书
(2) Hi5a控制器附加轴功能说明书
(3) Hi5a控制器变位机(positioner)同步功能说明书
(4) Hi5a控制器点焊功能说明书
1.2.主要规格
项目 | 规格 |
可更换电机的最大数量 | 16个 |
更换轴配置 | 伺服焊枪、变位机(positioner)、JIG |
可同时更换的最大数量 | 4个 |
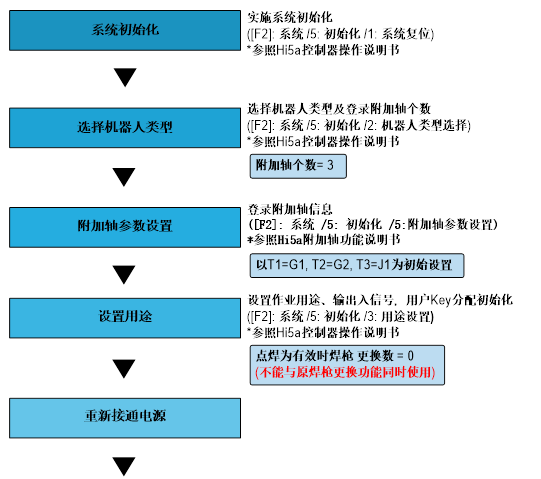
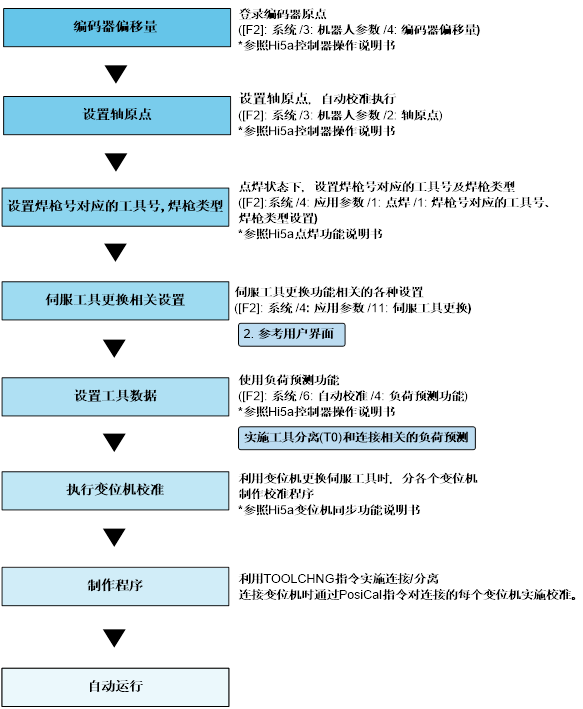
1.3.操作顺序
※ 设置焊枪号对应的工具号、焊枪类型(限点焊作业)
指定各焊枪号对应的工具号、附加轴号、焊机号。
仅对于本项目上设置的焊枪号、伺服刀具更换器才能指定伺服刀具参数。
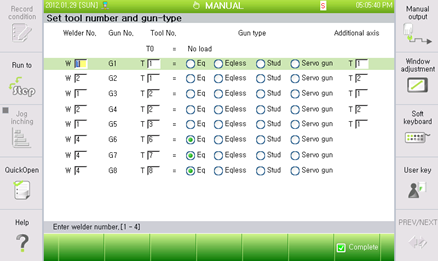
图 1.3 设置焊枪号对应的工具号、焊枪类型
焊机 | 焊枪号 | 工具号 | 焊枪类型 | 附加轴 |
W1 | G1 | T1 | 伺服焊枪 | T1 |
W2 | G2 | T1 | 伺服焊枪 | T2 |
W1 | G3 | T2 | 伺服焊枪 | T1 |
W2 | G4 | T2 | 伺服焊枪 | T2 |
W1 | G5 | T3 | 伺服焊枪 | T1 |