9.2.2. 姿势记录 MOVE语句、姿势代入文
9.2.2. 姿势记录 MOVE语句、姿势代入文
这是在姿势记录MOVE语句、姿势变量代入文中编辑姿势变量值的功能。
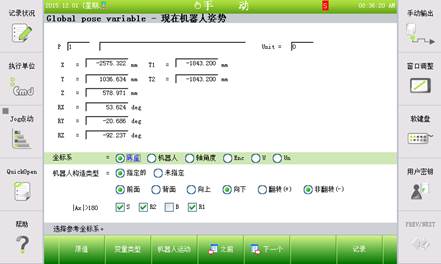
(1) 如果在记录为姿势參數的MOVE指令(MOVE语句)中按下[Quick Open]键、将显示以下监视姿势參數的屏幕。
(2) 将光标行移动到此条目上。如果在输入框中输入数字后按下[ENTER]键、将反映内容。
(3) 操作广播按钮时请按[SHIFT] + [←] [→] 键。
(4) 姿势变量编号(P)
显示当前姿势变量编号。输入其他变量编号后按[ENTER]键、就会移动到该变量。
(5) 注释
显示说明当前姿势变量的注释字符。可以利用键盘或软键盘编辑。(所输入的注释会保存于示教盒的/ResidentFlash/CataCmtP.txt文件、还可利用PC编辑。)
(6) 当前姿势变量坐标值
显示姿势变量值。利用光标移动到项目、修改时输入数字后按[ENTER]键就会反映所输入的内容。但、坐标系形式被设为Encoder时不会变更。
(7) 坐标系形式
在Base坐标系、Robot坐标系、轴角度、用户坐标系、Encoder值中选择用哪一形式表示当前姿势变量值。
(8) 机器人构成形态
坐标系形式为Base或Robot时显示、记述机器人的位置时在其器具特性上存在着复数的解、因此指定唯一记述其形态的机器人形态(Configuration)。 机器人构成形态的详细内容请参考‘2.5.3. 停止位置的确认/修改’。
(9) 『[F1]:现在机器人姿势/原值』
按一次、就会显示机器人的当前姿势值。再按一次、就会显示原来的姿势变量值。(切换动作)
(10) 『[F3]:机器人运动』
按住此键、机器人就会移动到所记录的姿势变量位置。(Jog)
(11) 『[F4]:上一个』/『[F5]: 下一个』
展现前一参数/后一参数的信息。
(12) 『[F7]:记录』
反映于姿势变量。在未记录的状态下按[ESC]键、就不会反映画面所显示的内容。