3.6.1. 允许负载转矩的估算
3.6.1. 允许负载转矩的估算
加载到机器人腕轴机械连接面的负载受到容许重量、容许负载转矩和容许转动惯性的限制。用于计算负载转矩及转动惯量的坐标系方向与机器人基坐标系的方向相同。检验R2轴的方式相同于对B轴的检验方式。
n 第1步
根据 B 轴的转动中心计算出重心位置(LX、LY、LZ)
LX: X 轴的重心位置
LY: Y 轴的重心位置
LZ: Z 轴的重心位置
n 第2步
依据转矩图,核对从 B 轴和 R1 轴的中心到重心的位置。
 ,
, 
LB : 从 B 轴旋转中心到重心的长度
LR1: 从 R1 轴旋转中心到重心的长度
n 第3步
以计算出的距离为准计算负载转矩。


 : B轴旋转中心上的负载转矩
: B轴旋转中心上的负载转矩
 : R1轴旋转中心上的负载转矩
: R1轴旋转中心上的负载转矩
 : 负载质量
: 负载质量
 : 重力加速度
: 重力加速度
n 第4步
以允许负载转矩表为准,查看在步骤三(Step 3)上所计算出的负载转矩是否小于限值。
n Note: 若负载质量类似于如下转矩线图上的质量,检验负载转转矩时,无需进行步骤三、步骤四,而查看在步骤二上所计算出的距离是否介于转矩线图范围内即可。若其位于转矩线图范围内,就意味着所计算出的负载转矩小于允许负载转矩。若其超出转矩线图范围,则意味着所计算出的负载转矩大于允许负载转矩。
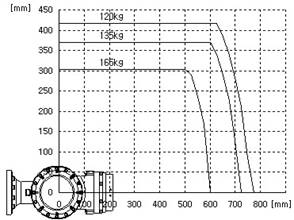
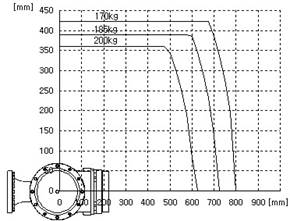
图 3.7 腕轴转矩图:[HS165S], [HS200S]
 容许负载转矩
容许负载转矩
表 3‑1 容许负载转矩
机器人型号 | 容许负载转矩 | ||
R2 轴旋转 | B 轴旋转 | R1 轴旋转 | |
HS165S | 小于 1,030N·m(105kgf·m) | 小于 490 N·m (50 kgf·m) | |
HS200S | 小于 1,333N·m(136kgf·m) | 小于 706 N·m (72 kgf·m) | |