3. 重试
开始Arc焊接时由于母材的焊接开始点周围的异物等造成无法产生Arc火花的情况。重试功能可以在失效的时候自动重新试图电弧点火、从而无需停止机器人实现连续操作。
如图3-1所示、Arc点火失败即按照重试功能设置执行‘重新进入’、‘焊线移动’、‘Shift移动’等操作。‘焊线移动’和‘Shift移动’按照移动量其Arc点火位置有可能不同、Arc点火成功后返回到焊接开始点再开始进行焊接。‘再进入’是在Arc点火失败的位置重新尝试Arc点火。 根据焊接子条件下设置的重试条件、将自动执行重试。
(1) 重新进入
机器人通过撤回运动数量朝着火炬前进方向从引焊点撤回、然后进行再进入。焊接条件适用初始焊接条件。
(2) 焊接线移动
在从引焊点朝着焊接继续方向运动之后、通过焊接线运动数量、重新开始焊接。在重试时适用的焊接条件将适用在焊接子条件下设置的重试条件的焊接条件。将重试条件编号设置为0、将触发电弧点火试图与主条件相同的条件。当电弧正常点火的时候、机器人将按照设定速度返回到引焊点。在返回引焊点之后、机器人将依据主焊接条件开始焊接。
(3) 转换运动
从引焊点按照转换运动数量运动之后、将重新开始焊接。在重试时适用的焊接条件将适用在焊接子条件下设置的重试条件的焊接条件。将重试条件编号设置为0、将触发电弧点火试图与主条件相同的条件。当电弧正常点火的时候、机器人将按照设定速度返回到引焊点。在返回引焊点之后、机器人将依据主焊接条件开始焊接。
重试功能是在焊接子条件的重试组下面进行设置的。详细标准包括频率、重试条件、运行模式、速度、缩回时间、缩回速度、撤回/焊接线运动量、以及转换运动量。为了编辑焊接子条件、点击在ARCON命令下的[快捷打开]、然后点击[F1: 补充条件]输入焊接子条件框。设置项目的具体内容请参阅[14.5 焊接子条件 - 重试、重新启动]。
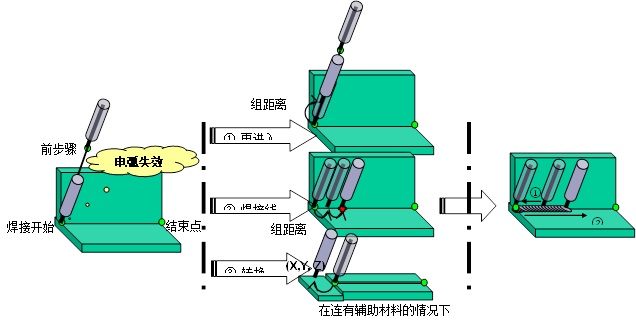
图 3.1 重试功能的顺序