4. 常见问题
在Arc焊接过程中、有可能因Arc关闭、焊接电流及电压超过极限值、气压变低、Wire不足、冷却水故障等造成焊接中断。此时、若从停止焊接的点继续开始焊接有可能出现漏焊的部分。重启功能就是为了避免这种情况而进行重叠焊接的功能。
重启条件设置是对由于Arc关闭等特定原因中止焊接后的重启方法进行设置。通过该设置、焊接被中断后无需采取特别措施即能自动重启焊接作业或排除被中断的原因后重启时沿着焊线退回一定距离后重新开始焊接。也就是说因出现问题而中断焊接的位置周围会出现重叠焊接的区间、以此避免在中止焊接后重启时发生漏焊情况。
根据焊接子条件框中调整的设置执行重新启动功能。
当焊接由于众多原因而停止、例如电弧故障、限制违反、气体压力较低、焊丝不足、以及冷却剂错误等的时候、可以采用以下方法进行重新启动。
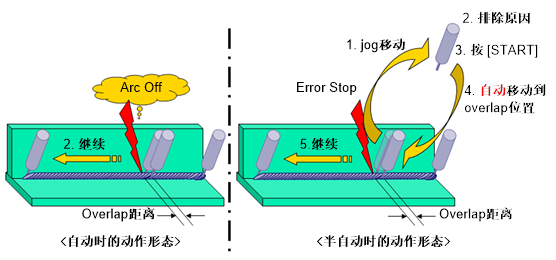
图 4.1 重新启动(半自动)的示例
l 禁止
禁止重叠焊接的设置。当发生例如电弧故障、限制违反、气体压力较低、焊丝不足、以及冷却剂错误的时候、焊接和机器人框架将停止。在消除故障原因并点击[操作]之后、机器人将不进行重叠焊接而从其停止位置重新开始焊接。
l 忽略
是忽略错误提示的设置。启用该设置时焊接作业被中断后机器人也不会停止而是继续运行。也就是说、机器人在运行过程中会忽略掉Arc关闭或超出极限值的情况。而这种处理方法仅适用于因Arc关闭、超过极限值而被中断后重启的情况。
l 半自动
是由用户操作重叠焊接的设置。发生Arc关闭、超过极限值、气压变低、Wire不足、冷却水故障等情况时在中断焊接作业的同时停止机器人运行。待故障被排除后用户按[启动]时按照焊接辅助条件的重启项目所设置的方法进行重叠焊接后继续原来的作业。
此时、通过Jog动作把机器人移动到其他位置、按[启动]时机器人会立即移动到焊接位置并进行焊接作业。

告诫
当在机器人转运期间按下步进/退回按键、重新启动信息将被清除、焊接重叠将不执行。请始终使用 jog操作进行移动。
l 自动
自动进行重叠焊接的设置。该设置仅适用于因Arc关闭造成焊接中断的情况。在焊接过程中如出现Arc关闭则在不停止作业情况下、按照焊接辅助条件的重启项目所设置的方法进行重叠焊接后继续原来的作业。但在重叠焊接区间又出现Arc关闭的情况时则在其位置立即开始焊接。
有关各处理方法的具体内容请参阅[14.5 焊接子条件 - 重试、重新启动]。