2.1.2. Cube领域设置
2.1.2. Cube领域设置
选择『[F2]: 系统』 → 『4: 应用参数』 → 『7: 防止干扰』 → 『1: Cube干扰防止』 → 『2: Cube领域设置』。
(1) Cube设置方法
Cube的设置方法有2种。
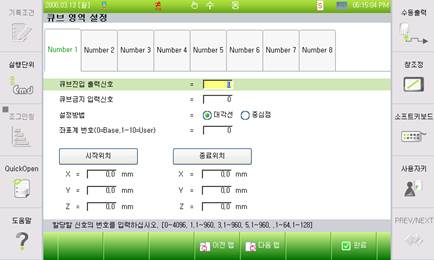
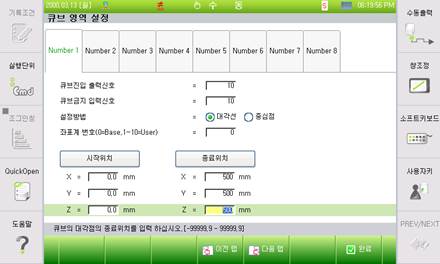
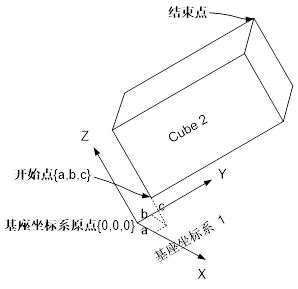
A. 对角点设置方法
n 对六面体的两个对角位置点进行设置。如下图所示、直接输入对角的开始位置和结束位置。
n 如要记录为当前机器人的TCP位置、把光标滚动到<开始位置>或<结束位置>后按'ENTER’键即可。
设置例示)

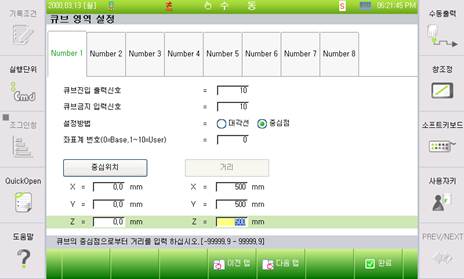
B. 中心点设置方法
n 中心点设置方法采用对Cube的中心点和X方向、Y方向、Z方向的距离进行设置的方式。
n 如要把中心点记录为当前机器人的TCP位置 、把光标滚动到<中心位置>后按'ENTER’键即可。
设置例示)

C. 在用户坐标系设置Cube
n Cube领域是直六面体、如要在空间上设置各种姿态的Cube领域、通过用户坐标系设置Cube即可。
n 如下图、Cube 1以基座坐标系设置、Cube 2以用户坐标系设置、Cube 3以用户坐标系2设置。
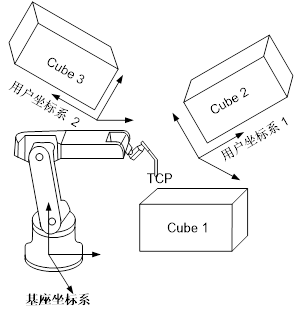
n 以用户坐标系进行设置时、必须要在用户坐标系上设置对角位置和中心位置。
(2) Cube输出入信号设置
- Cube进入输出信号: 感应机器人是否进入相应Cube领域后输出信号的功能。 给Cube进入输出信号设置信号编号。
- Cube禁止输入信号: 其他机器人进入相应Cube领域时为接收相关信号而设置信号编号。
两个机器人的公用Cube领域是机器人1的2号Cube 和机器人2的1号Cube。这种情况下、连接机器人1的Cube2号‘Cube进入输出信号’和机器人2的Cube 1号‘Cube禁止输入信号’、连接机器人2的Cube 1号‘Cube进入输出信号’和机器人1的Cube 2号‘Cube禁止输入信号’。