2.1. 内部PLC的模式设置
2.1. 内部PLC的模式设置
内部PLC的工作模式、可在『[F7]: 条件设置』→ 『[F1]:应用条件』 → 『5: 内部PLC 模式』的 <关闭、停止、 R-停止、 R-运行、 运行>中选一设置。
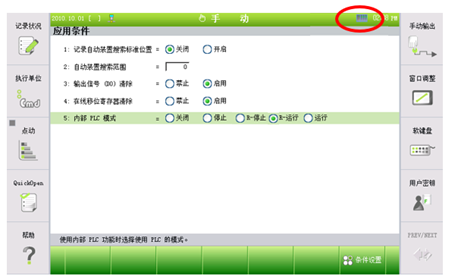
图 2.1 内部PLC模式设置
根据所选模式、在TP画面右上方显示图标。如上图所示、如果是[PLC=<R-运行>]或[PLC=<运行>]状态、就会显示PLC图标。如下图所示、[PLC=<关闭>]时图标会消失、 [PLC=<停止>]状态时会在PLC图显示红色禁止标记。
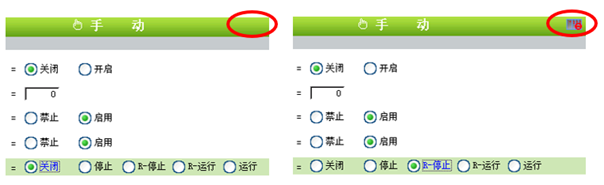
图 2.2 内部PLC Off 状态 图 2.3 内部PLC STOP状态
l 关闭
内部PLC的所有功能都会处于无效状态。这时、机器人控制器的数码输出(Digital Output)- DO1~DO4096会自动输出物理性输出(Physical Output)-Y1~Y4096、并且物理性输入X1~X4096会自动输入DI1~DI4096。这时各适用DI、DO、X和Y的属性。
例如、DO1为副逻辑、Y1也属副逻辑时如果用DO1=1输出、DO1会呈副逻辑、0被输入为Y1、Y1的属性会呈副逻辑、因此实际的输出值为Y1=1。
l R-停止 / 停止
停止内部PLC的工作。 R-停止 显示在HRLadder可以变更的Remote状态。如果设为STOP、就不能在HRLadder变更工作模式。 内部PLC被Stop时、PLC的输出信号DI、Y、R Relay会自动变为0。但、除PLC以外的HRBasic或分配中、 Y输出值为“SP11=On”时、Y输出就会保持之前值。
l R-运行 / 运行
启动内部PLC。 R-运行 显示可在HRLadder变更的Remote状态、如果设为Run、 就不能在HRLadder变更工作模式。