4.2.2. 控制器环路测试方法
4.2.2. 控制器环路测试方法
(1) 在机器人控制器的示教盒进入『[F2]: 系统』 → 『2: 控制参数』 → 『3: 串行端口』 → 『1: 串行端口 #1』 (或、『2: 串行端口 #2』)画面、按『[F1]:通讯测试』。
(2) 如[图 4.12] A所示、按画面指示使控制器盒的RS-232C端子的2-3号销处于短路状态。(若想检测外部电缆、就请按B指示进行。)
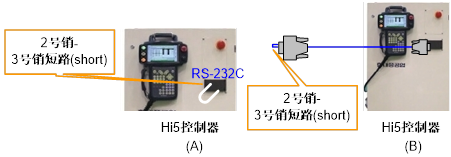
图4.12 控制器盒RS-232C收发信号短路
(3) 按[ENTER]键时、出现如[图 4.13]所示的信息就表示正常。
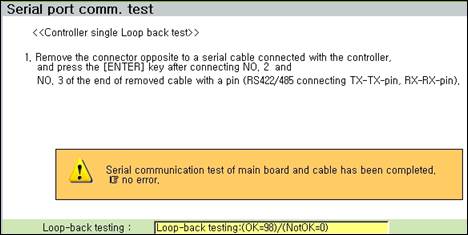
图4.13 环路测试结果正常
(4) 如[图 4.14]所示、错误时出现进入2号阶段的信息。按照画面指示、使主板的RS-232C端子2-3号销处于短路状态。
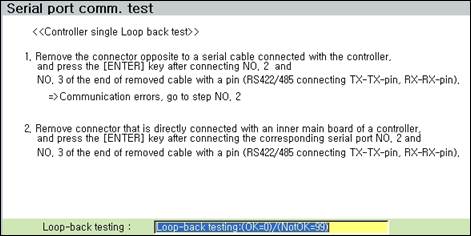
图4.14 主板RS-232C 收发信号短路

图4.15 主板RS-232C收发信号短路
(5) 按[ENTER]键时出现如下信息、就表示主板没有异常、请检测连接控制器盒内侧RS-232C端子与主板内电缆的接线状态。
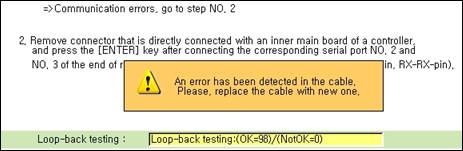
图 4.16 主板内RS-232C电缆检测信息
(6) 按[ENTER]键时出现如下图所示的信息、就表示主板有异常、请替换主板。
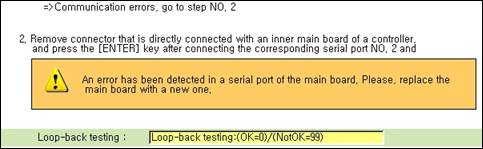
图4.17 主板 RS-232C 异常信息