3.2.1. PC侧回环(loop-back)测验方法
3.2.1. PC侧回环(loop-back)测验方法

图3.6 RS-232C 通信设定 对话框
(1) 如要测验RS-232C 连接是否正常时,先打开通信设定对话框按 键而连接通信。 按
键而连接通信。 按 键就会出现如下RS-232C所示的通信测验对话框。
键就会出现如下RS-232C所示的通信测验对话框。

图3.7 RS-232C 通信测验对话框
表3‑1 RS-232C 通信测验对话框
发报 组件边框 | 发报 键 | 输入在发报编辑框的字符串,转送到RS-232C。 (只能发报于前500byte) |
全删除 键 | 全删除于发报编辑框的字符串 | |
编辑框 | 发报字符串的记录位子。文本文件回环检验时,会表示转送的字符串。 | |
收报 组件边框 | 全删除 键 | 全删除于收报编辑框的字符串 |
编辑框 | 表示于收报到RS-232C的字符串 | |
测验结果 编辑框 | 表示检验文本文件回环的结果。 表示发报的byte 数和收报的byte 数、一致与否、不一致的位置而其字符串等。 | |
自动 检查框 | 自动重复于文本文件回环检验的选择与否 | |
文本文件的回环检验 键 | 执行文本文件回环的检验。从内装的文本文件读长字符串数据而发报到RS-232C后,比较与回环收报的数据其将检验一致与否。收发报数据表示在各编辑框。 | |
关闭 键 | 关闭RS-232C 通信测验对话框 | |
(2) PC的串行接口中, 确认选择的COM接口是否正常运作的方式如下。首先 如[图 3.8]在PC的COM接口装置电缆连接器而把2号和3号PIN要互相段落(short)。

图3.8 PC侧收发报段落
(3) 点击文本文件回环检验键, 会收发报内装的文本文件而其将内容显示在编辑框。显示出的内容如[图3.9]为正常。
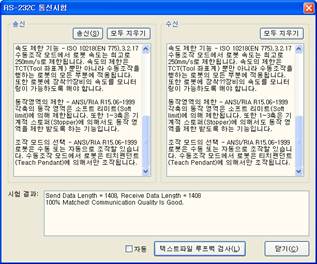
图3.9 文本文件回环检验
(4) 据测验结果的结论如下[表3-2]所示。
表3‑2 PC侧文本文件回环检验 结果
结果 | 结论 (可以推断的原因) |
直接输出在收报编辑框发报的数据,显示出“测验结果为100% Matched!” | PC的COM接口运作为正常 |
在收报编辑框没显示出任何数据。 | - 电缆中断 - 把电缆连接在另一个COM接口(连接错误) - PC的COM接口故障 - 2号 3号 PIN没有 short。 - USB-Serial 产品(使用时)的设定错, 不良 |
与发报数据不同,在收报编辑框会出现被部分损坏的字符串。 | - PC的COM接口收发报功能为部分不良。需要差点H/W的故障与否。 - USB-Serial 产品(使用时)的不良, 性能不足 |
(5) 确认与机器人控制器和串行通信的连接是否正常的方法为如下。先如[图3.10] 使用串行通信电缆连接PC的COM接口和机器人控制器。

图3.10 PC –控制器之间的RS-232C 连接
(6) 从机器人控制器的示教盒进入到『[F2]: 系统』→ 『2:控制参数』 → 『3: 串行接口』 → 『1: 串行接口 #1』 (或, 『2: 串行接口 #2』) 画面,设置于通信参数与PC侧要一致而如[图 3.11]所示,把“回送”设定为<启用>。
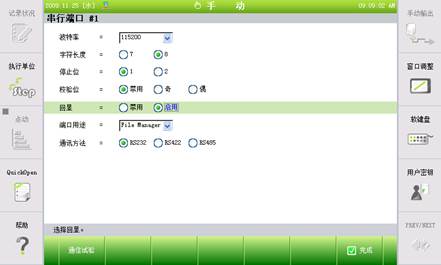
图3.11 把串行接口回送设定为有效
(7) 点击文本文件回环检验键,就会收发报内装的文本文件其将内容显示在编辑框。按测验结果的结论如下[表3-3]所示。
表3‑3 PC - 控制器文本文件回环检验结果
结果 | 结论 (可以推断的原因) |
直接输出在收报编辑框发报的数据,显示出“测验结果为100% Matched!” | 与机器人控制器和PC之间的串行通信连接为正常 |
在收报编辑框没出现任何数据。 | (PC侧 回环测验为正常时) - 电缆的RX, TX 连接错误. - 把电缆连接在另一个COM接口(连接错误) - 机器人控制器的COM接口故障. - 机器人控制器贮存柜内部的串行电缆中断。 |
与发报数据不同,在收报编辑框会出现被部分损坏的字符串。 | (PC侧 回环测验为正常时) -机器人控制器的COM接口收发报功能为部分不良。需要差点H/W的故障与否。 - USB-Serial 产品(使用时)的不良, 性能不足 |
(8) 测验后示教盒串行接口画面的“回送”设定要从新恢复为<无效>。