3.2.2. 控制器侧回环测验方法
3.2.2. 控制器侧回环测验方法
(1) 从机器人控制器的示教盒进入到『[F2]: 系统』 → 『2: 控制参数』 → 『3: 串行接口』→ 『1: 串行接口 #1』 (或, 『2: 串行接口#2』) 画面而按『[F1]: 通信测验』键。
(2) 按画面的指示,如[图3.12]A所示,段落控制器贮存柜的RS-232C 终端的2-3号PIN。(要差点到外部电缆时, 段落如B)
 A
A  B
B
图3.12 控制器贮存柜侧 RS-232C 收发报段落
(3) 按[ENTER] 键时,出现如[图 3.13]的信息就是正常。
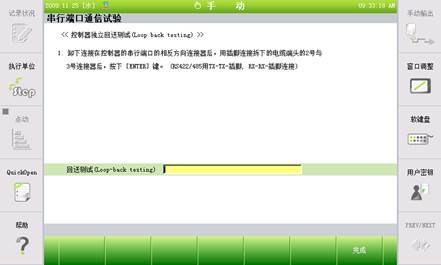
图3.13 回环测验结果正常
(4) 错误的情况时,如[图3.14]会出现转入2号阶段的的信息。按画面的指示, 段落在主板 RS-232C终端的2-3号PIN。
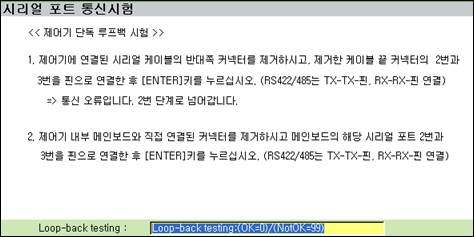
图3.14 主板侧 RS-232C收发报段落

图3.15 主板侧RS-232C 收发报段落
(5) 果按[ENTER]键会出现如下的信息而证明为主板没有异常,因此制器文件柜的内侧而连接于从RS-232C 终端到板的版内的电缆结线。
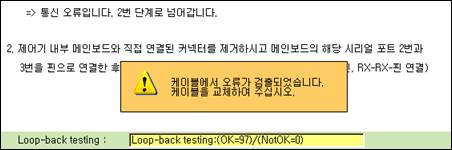
图3.16 版内RS-232C 电缆检查信息
(6) 如按[ENTER]键时出现如下的信息,就证明为主板问题。请要换主板。
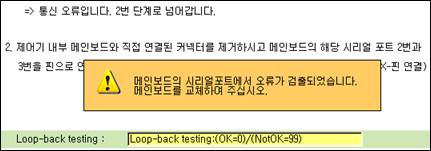
图3.17 主板 RS-232C 异常信息