2.11.2. 多任务(Multitasking)Motion示教案例
2.11.2. 多任务(Multitasking)Motion示教案例
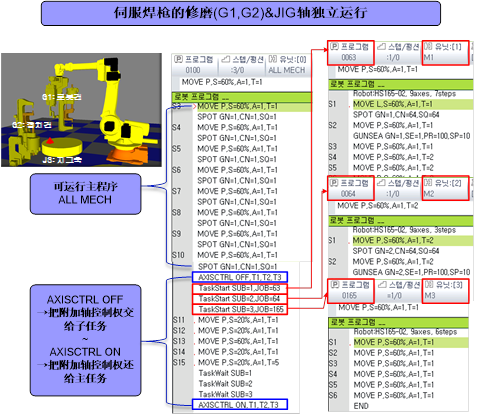
如下图所示、通过由机器人焊枪和整齐枪JIG轴组成、并有3个附加轴的系统适用多任务(Multitasking)Motion的例子可以了解使用方法。
(1) 主程序是100号程序。主程序可以选择Unit0以驱动所有轴、运行主程序时依次运行MOVE和SPOT、执行命令至Step 10。
(2) 之后在主程序运行AXISCTRL OFF T1、T2、T3命令即设置为在子任务控制指定的轴号。在此情况下不会移动到记录到主程序的Step11~15上的T1、T2、T3的位置。
(3) 通过TaskStart命令来指定子任务1、2、3要执行的程序。分配到子任务上的程序必须要以独立Unit进行设置、且子任务之间指定为Unit的轴不得相重。例如Unit1指定Mechanism M1=T1轴、Unit 2是Mechanism M2=T2、Mechanism M3=T3、指定的时候一定要遵守排他性原则。
(4) 根据TaskStart命令、分配到子任务的程序0063、0064、00165被独立执行、程序执行Step11~15。
(5) 在主程序遇TaskWait命令时、直到指定的子任务完成执行END一直保持等待状态。因此主程序会等到子任务1、2、3全部结束。
(6) 执行AXISCTRL ON命令以令主程序重新导入附加轴控制权。