2.3. Roller hemming加压力控制功能设置顺序
2.3. Roller hemming加压力控制功能设置顺序
(1) 首先在 [『[F2]:系统』 → 『4: 应用参数』 → 『12: 控制包边施压力』 → 『功能使用』]把功能使用设置为‘启用’。

图2.1 Roller hemming加压力控制菜单
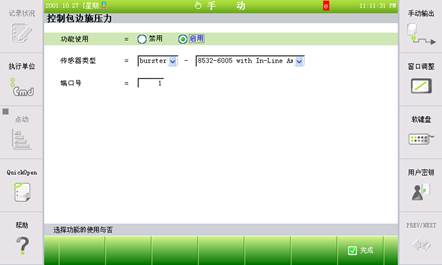
图2.2 Roller hemming加压力控制设为‘启用’的画面
(2) 确认安装在Roller hemming Tool上的测压仪是否是burster公司制造的带有‘增幅器的8532-6005’产品。 且在[『[F2]: 系统』→ 『4:应用参数』 → 『12: 控制包边施压力』 → 『传感器类型』]中选择相同的传感器。
(3) 为了从控制器获得测压仪的模拟输出入信号使用模拟板(Arc Board, BD584V30)。测压仪的输入是否连接到模拟输入端口1。 且在[『[F2]:系统』 → 『4: 应用参数』 → 『12: 控制包边施压力』 → 『端口号』]把输入端口设置为1。
(4) 给测压仪接通电源,连接到控制器模拟输入端口时可从控制器获得加压力信息。边变更给测压仪施加的压力,确认T/P上显示的值是否有问题。
(5) 机器人为控制加压力以当前启用的Tool坐标系的Z轴方向移动。 随之,要确认各Roller的Tool坐标系定义是否准确。
(6) 最后,Roller hemming Tool在不接触外部的状态下对传感器进行初始化。 初始化时选额[『[F1]: 服务』→ 『1:监测』 → 『22: 包边数据』](光标在Roller hemming数据监控窗时)点击『5: 复位』及出现对话框。传感器初始化画面如下。

图2.3 测压仪初始化画面
(7) 如要在G/P(Graphic Pannel)上显示Roller hemming加压力的实时数据,定义为SW195。(单位: [N])
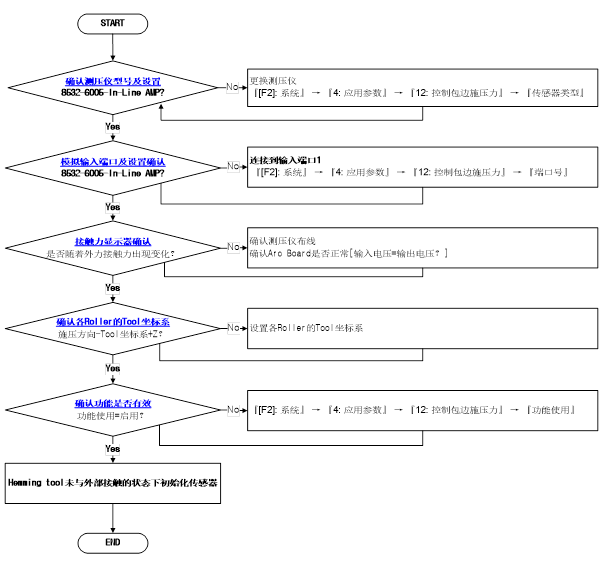
图2.4 功能使用前的设置顺序