4.2. 伺服机构臂轴加压/开启
4.2. 伺服机构臂轴加压/开启
针对作业物的HANDING的伺服机构臂轴的加压及开启动作如下图一样进行动作。
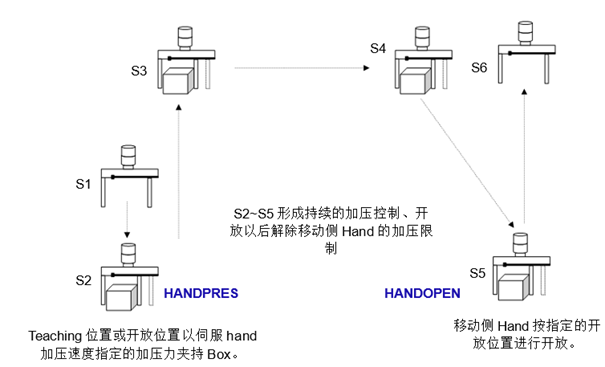
图4.1 针对作业物HANDING的伺服机构臂加压/开启动作
(1) 移动记录有HANDPRES功能的STEP时、从之前STEP的位置向机器人记录的位置移动。向记录有伺服机构臂的移动轴的位置上合并上HANDPRES功能的加压偏移距离的位置移动。此时、机器人轴和伺服机构臂轴都同时到达目标位置。
(2) 以设置的加压力开始加压。此时、以伺服机构臂加压速度移动。
(3) 若加压力达到一致、夹起作业物移动到装载STEP。
(4) 向记录有HANDOPEN功能的STEP移动后、开启至指定开启位置。此时伺服机构臂轴的速度为最高速。
(5) 开启完成后向下一STEP移动。

l 手动模式中以STEP前进/后退运行的情况、条件设置的STEP前进/后退时、与Function执行选择状态无关、正常执行。
l 伺服机构臂轴加压/开启位置不得偏离软限制位置。
l 在伺服机构臂轴加压力非常小的情况下、也无法执行希望作业。
l 请考虑作业物和加压开始位置距离对有HANDPRES功能的STEP的准确度等级进行调整。