1.2. 传送装置同步原理
1.2. 传送装置同步原理
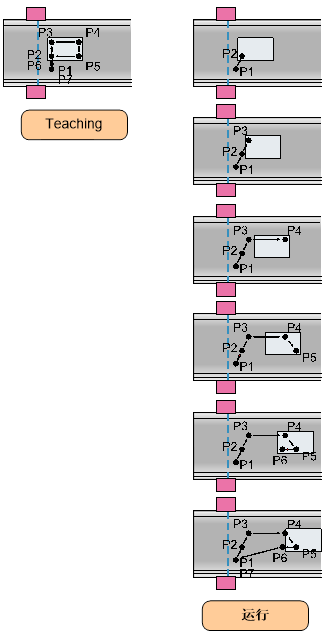
如下图所示、传送装置在停止状态下运行Teaching后轨迹P1~P7(P2~P6是传送装置同步)时、对于搭载到传送装置上移动的作业物、得出作业物从极限开关移动的量后加到基准位置运行。为此、机器人应与变动的传送装置速度形成同步、保持作业物和Tool之间的相对位置及姿势。
如下图所示、传送装置在停止状态下运行Teaching后轨迹P1~P7(P2~P6是传送装置同步)时、对于搭载到传送装置上移动的作业物、得出作业物从极限开关移动的量后加到基准位置运行。为此、机器人应与变动的传送装置速度形成同步、保持作业物和Tool之间的相对位置及姿势。