4.2. 同步作业程序的构成
4.2. 同步作业程序的构成
n 原位置等待
直到输入启动命令、机器人一直在原位置等待。
n Interlock等待
机器人提前移动到同步作业区间附近后、等待作业物到达WaitSensor指令记录的距离。
下图是对传送装置送来的作业物进行喷涂作业的程序。机器人在进行Step 4作业时开始传送装置同步、从移动到Step 5时在同步状态下给作业物喷漆。这时把Interlock等待Step(Step 3)记录到同步作业区间的进入Step(Step 4)附近。
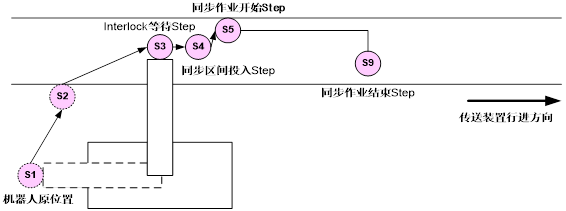
上述作业的程序如下。
Step 1 Step 2 Step 3 | → 机器人原位置
→ Interlock等待Step |
SensorSync Sensor=1、Sync=1 WaitSensor Sensor=1、Sync=0、Pos=500 Step 4 DO1 = 1 Step 5 | → 传送装置同步运行ON → 传送装置Interlock等待 → 同步区间投入Step → 喷漆ON信号 → 同步作业第一个Step |
ː |
|
Step 9 DO1 = 0 SensorSync Sensor=1、Sync=0 Step 10 ː | → 同步作业最后Step → 喷漆OFF信号 → 传送装置同步运行OFF
|
Step 13 END | → 机器人原位置 |
n 同步运行
图示中传送装置同步运行区间是指Step 4到Step 9、这一区间的所有命令与传送装置同步运行。
n 原位置复位
结束作业的机器人为下一个启动命令回到原位置。