4.4. 取消传送装置同步的Teaching
4.4. 取消传送装置同步的Teaching
到最终Step都启用传送装置同步动作的程序会根据传送装置的速度在最终Step的机器人位置就会不同。尤其是传送装置的速度快时从最终Step到下一周期第1 Step的动作时间会增加、因此到下一周期的最终Step其位置会移动到更下游的位置。这种现象随着每一个周期的重复而累积最终导致机器人发生软限制而无法执行作业的情况。
为了避免这种现象、在最终Step之前应取消传送装置同步、令机器人始终在同一个位置开始下一周期的作业。
n Teaching例示 1
下面是取消传送装置同步的程序例示。
Step 1 SensorSync Sensor=1、Sync=1 WaitSensor Sensor=1、Sync=0、Pos=500 Step 2 Step 3 Step 4 SensorSync Sensor=1、Sync=0
Step 5 END | → 传送装置同步运行ON → 传送装置Interlock等待
→ 传送装置同步运行OFF
|
在Step 4上记录传送装置同步运行OFF命令时到Step 5机器人就不会与传送装置同步、而移动到Step 5记录的位置。也就是说、机器人与传送装置而无关始终停止在固定位置(首次Step 5记录的位置)、在移动到下一周期的第一个Step的时间也是固定的。
n Teaching例示 2
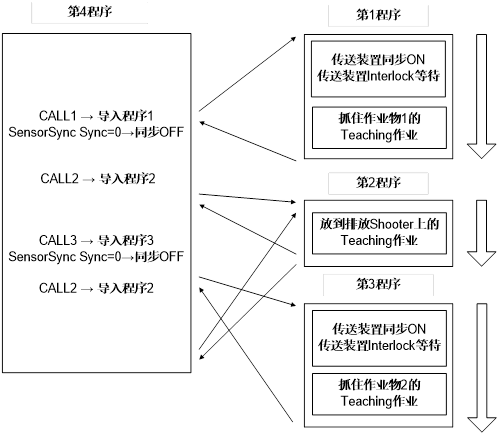
如下图所示、传送装置上放置有2个作业物的托盘时、了解一下机器人如何一个一个的把作业物移动到排放shooter的系统Teaching方法。

(1) 以传送装置同步作业抓住托盘上的作业物1。
(2) 把作业物1放在排放shooter上面、这时排放shooter不在传送装置上面、因此要取消传送装置同步。
(3) 以传送装置同步作业抓住托盘上的作业物2。
(4) 把作业物2放在排放shooter上面、这时排放shooter不在传送装置上面、因此要取消传送装置同步。
在进行这些动作时、使用前面说明的Block分割功能会更加便捷、Teaching举例如下。
这个系统需制作4个程序。
程序1是抓住作业物1、程序2是把作业物搬运到排放shooter、程序3是抓住作业物2。程序1、2、3是通过程序4被导入(CALL)、但在导入程序2之前应关闭传送装置同步运行。