2.1.1. 登录固定工具坐标系
2.1.1. 登录固定工具坐标系
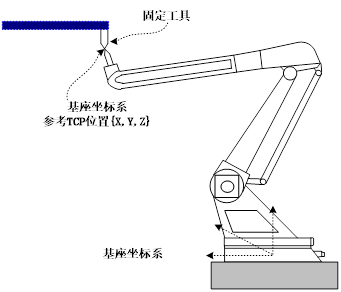
把固定工具的设置位置登录为基础坐标系的基准为止。一般如下图所示,可对准固定工具和机器人工具的TCP以确认固定工具的位置。从0~3,可登录4个固定工具。
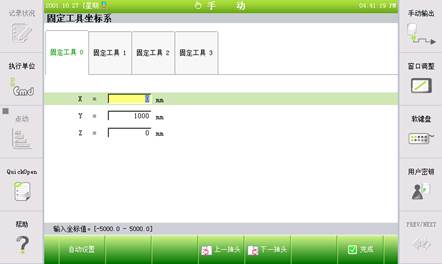
选择『[F2]: 系统』 → 『2: 控制参数』 → 『7: 坐标系记录』→ 『2:固定工具坐标系』。按自动设置(F1)即输入当前的TCP值。如需保存设定的值按完成(F7)键退出。
把固定工具的设置位置登录为基础坐标系的基准为止。一般如下图所示,可对准固定工具和机器人工具的TCP以确认固定工具的位置。从0~3,可登录4个固定工具。
选择『[F2]: 系统』 → 『2: 控制参数』 → 『7: 坐标系记录』→ 『2:固定工具坐标系』。按自动设置(F1)即输入当前的TCP值。如需保存设定的值按完成(F7)键退出。