2.1.6. 程序编制例题
2.1.6. 程序编制例题
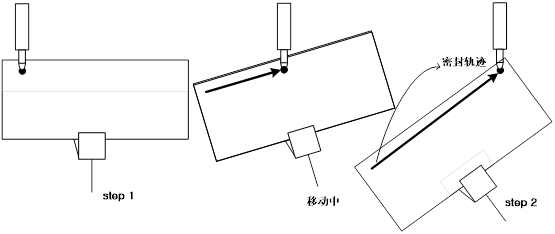
l 直线插值 (MOVE SL)
机器人在操作作业物,且外部使用固定密封工具的情况下,用户移动机器人对准密封工具后进行示教。如下图a)所示,从S1到S2以直线密封时如图b)记录Step1,拟移动到固定工具插值位置的Step2则如同图c)可移动机器人的位置和姿势进行示教。

a) 拟进行密封的轨迹


b) Step 1的示教位置 c)Step 2的示教位置
以下示教程序如下图所示,机器人的动作使固定工具对作业物画直线移动。
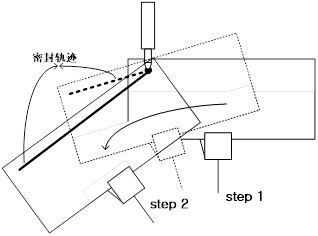
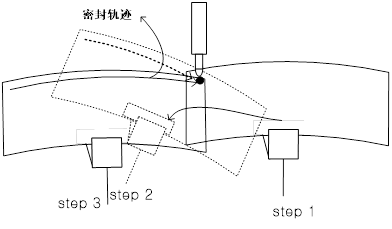
l 圆弧插值 (MOVE SC)
停止工具的插值功能也支持圆弧插值。把拟画出下图所示圆弧轨迹的Step记录为圆弧插值。

如上图所示对Step1进行示教,把Step 2示教为固定工具圆弧插值。且对上图的Step3进行示教令其成为圆弧插值的合理参照Step。以固定工具圆弧插值进行示教的Step如下所示,就固定的固定工具,机器人的移动会令作业物形成圆弧轨迹。