4.8.4. 平均负荷率诊断
4.8.4. 平均负荷率诊断
表示操作机器人的时候用于各轴的电机扭矩的平均负荷率。计算平均负荷率、仅在没有发生机器人的伺服故障或紧急停止的正常工作情况下计算、还除外快速停止时发生的过度扭矩。
以电机扭矩I/Ir为准写入平均负荷率、由于利用固定在机器人控制器内部的缓冲器计算、根据机器人工作程序的特性、平均负荷率的更新时间也有所不同。按轴计算的话、只考虑各轴的移动时间计算平均值、因此、将机器人停止时的扭矩不算进平均负荷率。
选择『[F1]:服务』 → 『7:系统诊断』 → 『9:平均负荷率诊断』。
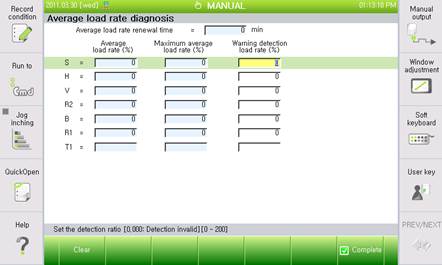
(1) 平均负荷率的更新时间[min]
是指计算平均负荷率的机器人操作时间。因伺服故障或紧急停止等而停止的话、不计算平均负荷率。
(2) 平均负荷率[%]
表示平均负荷率更新时间的各轴电机的平均负荷率(I/Ir)。从机器人控制器内部指定的缓冲器开始填充表示平均负荷率、之前表示为0。根据机器人工作的特性、填充缓冲器的时间有所不同。
(3) 最大平均负荷率
表示机器人操作的时候发生的最大平均负荷率。关掉控制器电源或选择『[F1]:清除』的话、能够重新测定。但、在平均负荷率更新时间里数据表示为0。
(4) 警告检测负荷率
这是各轴平均负荷率超过一般使用值的话、为了向用户发出警告而用户设置的负荷率。它为0的话、没有警告检测、只有设置数值、才能检测。发出警告的话、在示教盒显示“W0142轴) 在工作中平均值负荷率异常”、输出在『[F2]:系统』→『2:控制参数』→『2:输入输出信号设置』→『4:分配输出信号』的平均负荷率异常警报率诊断设置的信息。即使发出警报、机器人也没有停止继续工作。
(5) 『[F1]:清除』
重新测试、这时需要等待填充缓冲器的时间。

l 选择『[F1]:清除』的话、弹出如下信息。
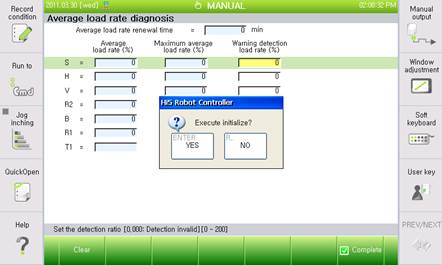
l 选择[Yes]键、删除到目前为止保存的所有平均负荷率信息后进行初始化。