4.2. 利用触摸传感及电弧传感来执行Fillet焊接
4.2. 利用触摸传感及电弧传感来执行Fillet焊接
电弧传感功能通常与触摸传感功能一起使用。若使用触摸传感功能,可以找到准确的焊接始点及终点;若使用电弧传感功能,则在开始焊接后移动,找到准确的方向。
第一个示例为最基本的Fillet焊接。
作业顺序如下:
① 设置摆动条件、电弧传感条件及焊接条件。
② 利用触摸传感来探索焊接始点(开始位置)。
③ 移动到终点附近后,利用触摸传感来探索焊接终点。
④ 在焊接始点利用摆动指令、电弧焊指令来执行相关作业。
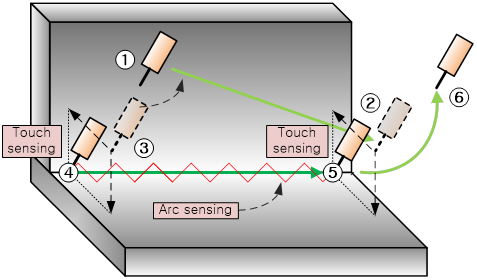
图 4.1 Fillet触摸传感及电弧传感
l 示例程序如下:
~~~~~~~电弧传感程序0001.JOB~~~~~~~~~~~~~~~
'电弧传感程序
S1 MOVE P,S=60%,A=3,T=1 ' 1:工作始点
S2 MOVE L,S=30%,A=3,T=1 ' 2:终点触摸传感位置
TOUCHSEN TSC#=1,-X,-Z,0,P10,V1! ' 3:终点触摸传感,在P10中保存位置
S3 MOVE L,S=30%,A=3,T=1 ' 4:始点触摸传感位置
TOUCHSEN TSC#=1,-X,-Z,0,P1,V1! ' 5:始点触摸传感,在P1中保存位置
S4 MOVE L,P1,S=20%,A=3,T=1 ' 6:移动到焊接始点
WEAVON WEV#=1 ' 7:开始摆动、电弧传感
ARCON ASF#=1 ' 8:开始焊接
S5 MOVE L,P10,S=60cm/min,A=3,T=1 ' 9:移动到焊接终点
ARCOF ASF# '10:焊接结束
WEAVOF '11:摆动、电弧传感结束
S6 MOVE P,S=60%,A=3,T=1 '12:工作终点
END
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~