8.2 触摸传感功能
8.2 触摸传感功能
触摸传感主要用于检测出工件位置及焊接起始点或结束点。

图8.4 触摸传感示例
因为JIG或定位器的误差及工件间隔不同等原因,不能保障工件总是位于一定的位置上。此时,通过使用触摸传感功能,可检测出焊接起始点及结束点,从而能够正常进行焊接。或者,如果用触摸传感功能来记录基准位置,可计算出当工件进入时工件从基准位置移位的程度。同时,还可使用自动计算并补偿这种移位量的功能。.
如图8.12所示,触摸传感支持共8中类型(Fillet、VGroove、Butt、LRCen、应用Fillet、应用Fillet2、DetectGroove及Wall)。








图8.5 触摸传感类型
触摸传感有共8个条件,在指令上按下“Quick Open”,就会弹出如图8.13所示的编辑界面,所编辑的内容将在ROBOT.TSC文件中保存探测速度、避开速度、探测距离、进行距离、误差补偿量、触摸方式等条件。


图8.6 触摸传感条件编辑界面
触摸传感指令可在T.P界面上通过“指令输入”-“Arc”-“TOUCHSEN”进行记录。指令结构如下:
TOUCHSEN TSC#=条件编号,探测方向1, 探测方向2, 探测方向3,已计算的姿势,butt gap变量
TOUCHSEN TSC#=条件编号,探测方向1, 探测方向2, 探测方向3, 探测方向角度,已计算的姿势,butt gap变量
TOUCHSEN TSC#=条件编号,探测方向1, 探测方向2, 探测方向3, 探测方向角度,PAR=姿势移位编号 butt gap变量
TOUCHSEN TSC#1, +TX, +TZ, 3, P10, V1!
TSC#1 :触摸传感选项编号(相当于ROBOT.TSC文件的条件的Index编号)
+TX, +TZ :探测方向参数(可输入直角,姿势,工具坐标,工具投影)
3 :接触地面后上升的距离[mm] (Butt, V Groove),探测基准距离(DetectGroove)
P10 :经传感计算的姿势将要保存的姿势变量
V1! :当为Butt工件时,所要保存gap的变量(小数点后第一位四舍五入)
QuickOpen键 : 可指定探测速度,避开速度,探测距离,进行距离,误差补偿量,触摸方式(接触,移开)
传感方向可以按工件类型指定,详情如下:
Fillet :基础坐标方向、姿势方向、工具投影方向、+TZ方向
Butt :姿势方向,工具坐标方向
V Groove :姿势方向,工具坐标方向
LRCen :工具坐标方向
AP_Fille :工具投影方向
DetectGroove:工具坐标方向,工具投影方向
Wall :直角方向,工具坐标方向,工具投影方向
类型 | 最大探测 方向数量 | 直交XYZ *计划**支持 * *所有**类**型* | 工具坐标系 | 工具投影坐标系 | 姿势 | 其他 输入因子 |
Fillet | 3 | O | O (1触点) | O | O | 后退距离 |
Butt | 2 | X | O | X | O | 误差补偿量 |
VGroove | 2 | X | O | X | O |
|
LRCen | 1 | O | O | X | X |
|
AP_Fillet | 2 | X | X | O | X | 进行距离1,2 |
AP_Fillet2 | 2 | X | X | O | X | 进行距离1,2 |
DetectGroove | 2 | X | O | O | X | 进行距离1,后退距离1 |
假设在1号触摸传感条件(指令中由用户设置为Quick Open的条件)上将工件类型指定为Fillet,2号条件上指定为Butt, 3号条件上指定为VGroove。示例如下:
TOUCHSEN TSC#=1, TF, TD, 0, P10, 0 1号条件,工具投影方向,2点触摸
TOUCHSEN TSC#=1, +X, -Y, -Z, P10, 0 1号条件,基础坐标方向,3点触摸
TOUCHSEN TSC#=1, P1, P2, 0, P10, 0 1号条件,姿势方向,2点触摸
TOUCHSEN TSC#=1, +TZ, 0, 0, P10, 0 1号条件,+TZ方向,1点触摸
TOUCHSEN TSC#=2, +TX, +TZ, 3, P10, V1!2号条件,工具坐标系方向,触摸地面后上升3毫米
TOUCHSEN TSC#=2, P1, P2, 2, P10, V1! 2号条件,姿势方向,触摸地面后上升2毫米
TOUCHSEN TSC#=3, -TY, +TZ, 3, P10, 0 3号条件,工具坐标系方向
TOUCHSEN TSC#=3, P1, P2, 3, P10, 0 3号条件,姿势方向
该功能支持的触摸传感方式(工件类型)如下:
[1] Fillet型
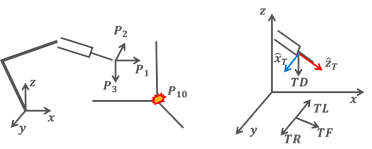
图8.7 触摸传感示例:Fillet类型
TOUCHSEN TSC#=1,P1,P2,P3,P10, 0
TOUCHSEN TSC#=1,+X,-Y,-Z,P10, 0
TOUCHSEN TSC#=1,TF,TD,0,P10 0
TOUCHSEN TSC#=1,+TZ,0,0,P10 0
• 工具投影方式:通过将工具坐标系的Z轴映射到基础XYZ平面上,决定前进、左右、下降方向,可由TF(前进)、TD(下降)、TL(左)、TR(右)组成。TL为TF*RotZ(90)方向,TR为TF*RotZ(-90)方向。
• 因焊接点过多而难以管理姿势时,使用变量工具投影方式(TPM)。
• 工件上存在旋转量(RX、RY、RZ)的扭曲Fillet,则可以使用角度指定选项来更改探测方向。
• 1点传感只指定一个探测方向因子,2点传感则安顺次指定两个探测方向。
[2] V Groove型
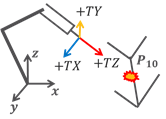
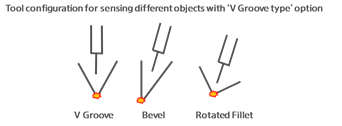
图8.8 触摸传感示例:V Groove类型
V Groove可用于对V Groove进行2点传感。此时,工具的位置及方向应类似于上图所示,位于角度的二等分线上。
TOUCHSEN TSC#=3, -TY, +TZ, 3, P10, 0 3号条件,工具坐标系方向
TOUCHSEN TSC#=3, P1, P2, 5, P10, 0 3号条件,姿势方向
• 为传感所需的上升距离不得小于3毫米。
[3] BUTT型
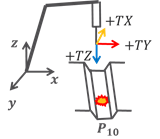
图8.9 触摸传感示例:Butt类型
TOUCHSEN TSC#=2, +TX, +TZ, 3, P10, V1!2号条件,工具坐标系方向,传感地面后上升3毫米
TOUCHSEN TSC#=2, P1, P2, 5, P10, V1! 2号条件,姿势方向,传感地面后上升5毫米
• 如图所示,BUTT型须将工具垂直于地面。
• 为传感所需的上升距离(传感地面后)不得小于3毫米。
• Butt gap的大小会根据上升距离的不同而有所不同。此时,若在指令的Quick open中输入误差补偿量,可以通过从中减去该数值来计算出butt gap。
触摸传感按如下顺序执行。
Fillet按四个选项向直角方向、姿势方向、工具投影方向及工具坐标方向反复进行“前进->后退”操作,计算焊接起始点。Butt或V Groove则以如下形式进行传感。(上面左右传感 → 地面传感 → 上升 → 下面左右传感)

图8.10 触摸传感顺序:Butt类型
就V Groove及Butt而言,在下面左右传感的中心点上向工件方向下降的一点就是经计算的姿势。就DetectGroove而言,按照下面传感→上升距离反复进行上升→前进。当下降时,若超过用户指定的探测基准,则会在下面传感的过程中停止,此时,其位置为所寻找的姿势。
在触摸传感指令中按下“Quick Open”,就可以编辑对于相关条件编号TSC#的触摸传感条件。
• 探测距离:探测距离是针对探测方向的距离,如果到达探测距离也仍未检测到工件,就会出现错误。
• 探测距离及避开速度:可指定探测或避开的速度。
• 误差补偿量:用于补偿butt gap。
• 后退距离:在Fillet类型上,指所要首次传感后避开的速度;在DetectGroove类型上,则指所要接触地面后上升的距离。
• 传感起点:接触时和解除接触时都可支持。一般来讲,主要使用接触时传感,误差几乎为零。只有在传感时须考虑因焊丝弯曲而引起的细微误差的状态下,才可在后退时进行传感。
角度指定选项可指定针对探测方向的角度。角度指定选项支持Fillet类型及DetectGroove类型。角度指定功能按照传感角度使传感顺序的移动轨迹旋转到TL轴和基础XYZ轴中一个轴。
图8.18表示Fillet及DetectGroove形工件上向Y轴或TL轴旋转30度的示例。
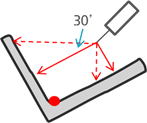
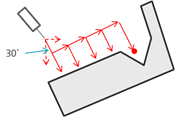
图8.11 触摸传感示例:角度设置
TOUCHSEN TSC#=1, +X, -Z, 0, Y30, P100, %V1!
TOUCHSEN TSC#=1, +X, -Z, 0, TL30, P100, %V1!
TOUCHSEN TSC#=2, TD, TF, 5, Y30, P100, %V1!‘DetectGroove
TOUCHSEN TSC#=2, TD, TF, 5, TL30, P100, %V1!‘DetectGroove
按照指定在工件类型及指令中的传感方向指定坐标系,可指定的角度旋转轴,详情请见下表:
类型 | 传感方向 指定坐标系 | 指定角度 轴 |
Fillet | 所有坐标系 | 直交XYZ轴 TL轴 |
Detect Groove | 工具 | 不可 |
工具投影 | 直交XYZ轴 TL轴 |
与Master/Execution Mode联动的触摸传感使用方法如下:
在Master模式上,所传感的姿势将保存在属于PAR编号的姿势编号中;在Execution模式上,将当前传感的姿势与在Master模式上传感的姿势进行比较,由此计算出移位量,其移位量将记录在属PAR编号的移位变量中。
TOUCHSEN TSC#=1, +X, -Z, 0, X0, PAR=10, %V1!
PAR是“Pose And Shift”的简称,主要用于分配姿势或移位变量的编号。就上述指令而言,在Master模式上,所传感的姿势将保存在P10姿势变量中;在Execution模式上传感时,与Master模式的移位量一起自动计算而保存在R0号中。