8.3. 高度传感(Height Sensing)功能
8.3. 高度传感(Height Sensing)功能
此功能像TIG焊接,在机器人的工具要与作业物保持一定距离时使用。因为TIG焊接其高度与弧长成比例,称为AVC(Arc Voltage Control)功能。与作业物的距离根据被传感器的模拟电压输入、电弧焊机感测的弧长校正用参数、焊接电流或电压值调整。
为使用该功能,将为传感功能的数据输入设定设为“使用”。
为传感功能的数据输入设定的具体内容请参考“1.3电弧焊应用条件设定”。
在传感功能用输入数据设定完毕后,可以按如下程序,使用高度传感功能。
(1) 指令输入
为开始高度传感,使用HSensON指令。在指令后边输入条件编号。高度传感条件共有8个。
为结束高度传感,使用HSensOFF指令。结束指令不需要特别的条件。
输入高度传感用指令的程序之例如下。
S1 MOVE L,S=100%,A=1,T=0
S2 MOVE L,S=20%,A=1,T=0
S3 MOVE L,S=100mm/s,A=1,T=0
HSensON AVC#=1 ß 高度传感开始
ARCON ASF#=2 ß 电弧焊开始
S4 MOVE L,S=10mm/s,A=1,T=0
ARCOF ASF# ß 电弧焊结束
HSensOFF ß 高度传感结束
S5 MOVE L,S=20%,A=1,T=0
END
(2) 高度传感功能动作顺序
高度传感在指令执行后,执行ARCON指令就开始动作。
在一般的情况下,在开始焊接的时候,电流、电压等处于不稳定状态,因此,等到稳定忽略输入数据。在输入数据稳定后,根据标准数据设定方式,计算出平均。如果是用户直接输入标准数据的方式,就立即执行高度传感。
高度传感动作顺序如下。
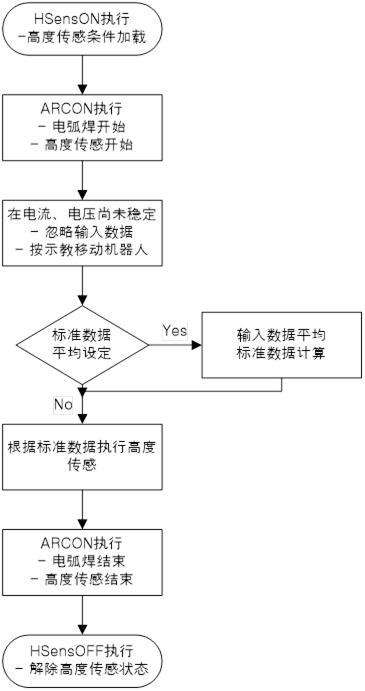
图 8.12 高度传感功能动作顺序