8.3.1.1. 高度传感条件
8.3.1.1. 高度传感条件
在“HSensON AVC#=??”指令按下[QuickOpen],进入『高度传感条件』设定画面。条件设定画面如下图。
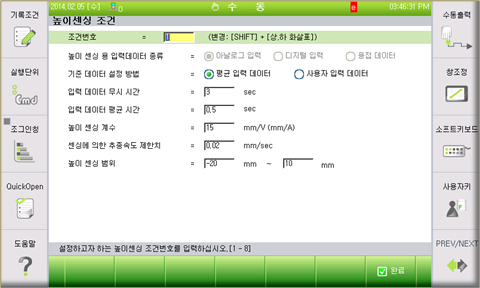
图 8.13 高度传感条件对话框
各项目的设定及操作方法如下。
(1) 条件编号: [1 ~ 8]
设定高度传感条件编号。
(2) 高度传感用输入数据种类
显示输入数据种类。在此显示的信息是在电弧应用条件的“电弧焊的传感功能用输入数据设定对话框”中被选的数据。
(3) 标准数据设定方法: <平均输入数据、用户输入数据>
选择标准数据设定方法。
- 平均输入数据: 根据传感初期标准数据的平均值设定
- 用户输入数据: 用户直接输入标准数据
(4) 输入数据忽略时间: [0.0 ~ 5.0]
是在开始焊接的不稳定状态忽略输入信号的时间。在该时间以后开始进行平均值计算及传感等动作。
(5) 输入数据平均时间: [0.5 ~ 10.0]
作为在标准数据的设定方法为Average input data(输入数据平均)时显示的项目,是输入忽略时间过后,为计算标准数据算出输入数据平均的时间。
(6) 标准数据设定: [-500 ~ 500]
作为在标准数据设定方法为User input data(用户输入数据)时显示的项目,是输入忽略时间过后,为计算标准数据算出输入数据平均的时间。
(7) 高度传感系数: [-100.0 ~ 100.0]
设定为计算数据跟踪量时使用的传感系数。该值越高,要校正的距离越增加,因此跟踪速度随之增加,也可以发生振动。该值小,跟踪速度减少,而振动会减弱。
如果该值设定为0,高度传感功能开始动作,但不执行位置跟踪,只接受输入数据。要得到为传感的标准数据时使用。
(8) 传感跟踪速度 限值: [0.001 ~ 5.0]
设定每秒的跟踪距离限值。该值为限制机器人的急速跟踪而设定。该值越大,跟踪速度越增加,振动也会发生。该值越小,机器人的可跟踪距离越减少,但振动会减弱。
(9) 高度传感范围: [-300.0 ~ 0.0], [0.0 ~ 200.0]
设定高度传感的总跟踪距离限值。