3.3. 实际应用程序
3.3. 实际应用程序
(1) 为执行制动器检查功能的准备已完成,所以将其应用到实际作业程序上。
(2) 在该示例中执行作业可以1天1次执行制动器检查。
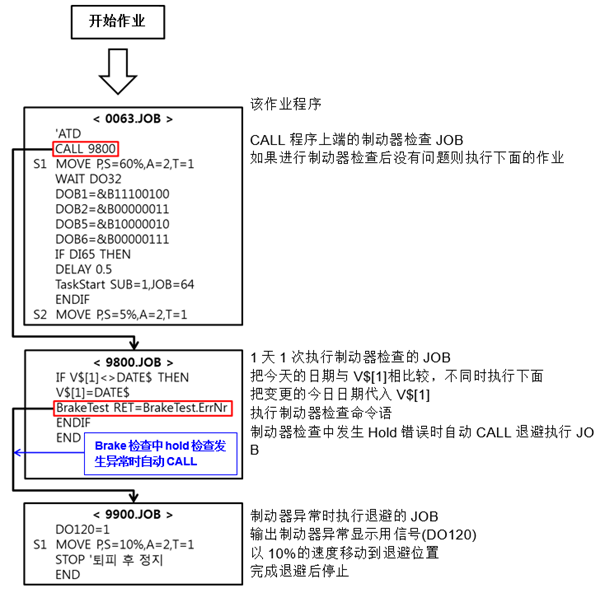
(3) 0063.JOB文件是机器人的该作业程序。为了在作业开始之前执行制动器检查,CALL检查用作业程序9800号JOB 。
(4) 已经执行今日制动器检查功能的情况,因为日期字符串不同,所以直接RETURN该作业程序后进行作业。
(5) 今日首次制动器检查的情况,因为日期字符串不同,所以按今日日期更新比较用变数后执行制动器检查。若在该检查中没有问题,则直接RETURN该作业程序后进行作业。
(6) 制动器检查中检测出Hold错误的情况,自动CALL为了退避位置移动的退避用作业程序9900号JOB。
(7) 如果发出制动器异常检测用输出信号,即使制动器被解除也会移动到安全位置后在保持ON MOTOR的状态的同时停止。