1.2.1. 主要功能规格
1.2.1. 主要功能规格
表 1‑1 协作控制规格
主要功能规格 | 备注 |
协作机器人台数 | 同一群组(group)内最多4台 |
通信方式 | 专用以太网(HiNet™) |
通信速度 | 100MBPS |
可设置为主机器人的台数 | 1台 |
可设置为从机器人的台数 | 每一台主机器人可控制三台从机器人 |
行走轴 | 支持行走轴协作 |
HiNet I/O | 每台机器人输出32点 |
无夹具协作 | 支持机器人与定位器之间的无夹具协作 |
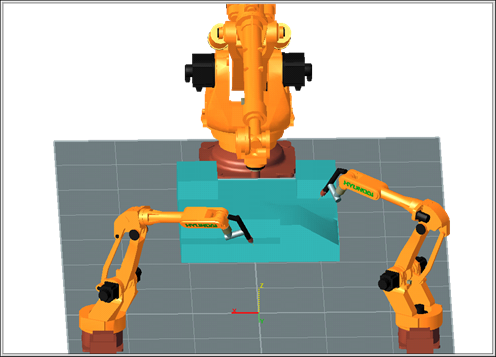
图 1.2 无夹具协作控制(Jigless Cooperation)
表 1‑1 协作控制规格
主要功能规格 | 备注 |
协作机器人台数 | 同一群组(group)内最多4台 |
通信方式 | 专用以太网(HiNet™) |
通信速度 | 100MBPS |
可设置为主机器人的台数 | 1台 |
可设置为从机器人的台数 | 每一台主机器人可控制三台从机器人 |
行走轴 | 支持行走轴协作 |
HiNet I/O | 每台机器人输出32点 |
无夹具协作 | 支持机器人与定位器之间的无夹具协作 |
图 1.2 无夹具协作控制(Jigless Cooperation)