3.5. CMOV记录模式点动(JOG)
3.5. CMOV记录模式点动(JOG)
CMOV记录模式旨在通过示教从机位置进行无夹具协作运动。
n CMOV记录模式的设置方法
① 将机器人角色设置为从机(Slave)。
② 将主机器人的手动协作状态设置为主机(Master)。
③ 若在直角坐标系点动状态下进行操作,如下图所示,将以主机的工具末端执行机构(end-effector)坐标系为准进行直角坐标点动。(V40.13-00版本以下)
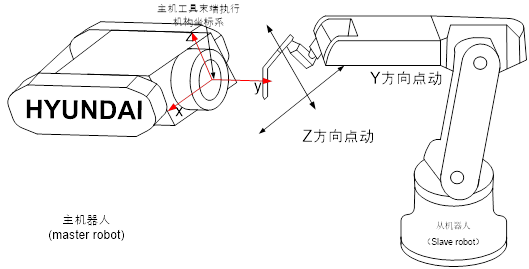
图 3.10 CMOV记录模式点动
④ 同样,在直角坐标系点动状态下,无论主机坐标如何,就以机器人的直角坐标系为准进行点动。(V40.13-03版本以上)

l 在协作控制系统上,行走轴应使主机与从机尽量成平行状态。
l 当从机处于CMOV记录模式时,则无法对手动协作状态被设置为主机(Master)的机器人进行点动操作。
l 因为根据版本的不同,CMOV记录模式的点动坐标系也有所不同,请注意。