8.1.协作控制状态显示屏
8.1.协作控制状态显示屏
(1) 请选择『[F1]: 服务』 → 『1: 监测』 → 『10: 协作控制数据』。

(2) 请选择『1: 协作控制状态』。

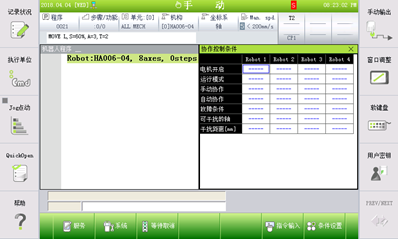
(3) 协作控制状态显示如下:
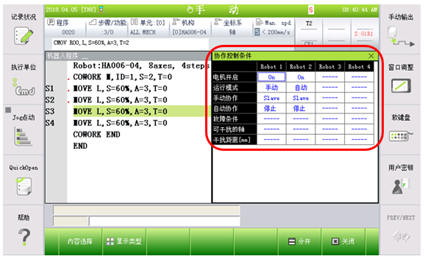
(4) 监测功能详情如下:
n 电机 ON:显示当前各机器人的运行准备状态。(ON/OFF)
n 操作模式:显示各机器人设置为手动模式还是自动模式。(手动/自动)
n 手动协作:显示各机器人在手动模式下的协作状态。
Individual:单独(独立)点动状态
Master:协作点动状态,指定主机
Slave:协作点动状态,指定从机
n 自动协作:显示机器人再生时的协作状态。
停止:机器人不处于启动状态。
独立:机器人执行独立的再生运动。
待机:在COWORK指令上等待对象机器人到达协作位置。
协作:正在协作再生。
n 错误状态:显示各机器人最近出现的错误状态, 启动时清除。
n 可能干涉轴:离对象机器人最近的自身机器人轴名称
n 干涉距离[mm]:与可能干涉轴之间的距离

l 在协作控制参数上,若协作控制设置为“无效”,则无法显示监测信息。