3.2. 传感器规格设置
3.2. 传感器规格设置
1. 进入路径
- 只有高于工程师模式才允许进入。
- F2.系统 -> 3:机器人参数 -> 12:系统维护 -> 4:真空机器人传感器设置
2. 设置界面
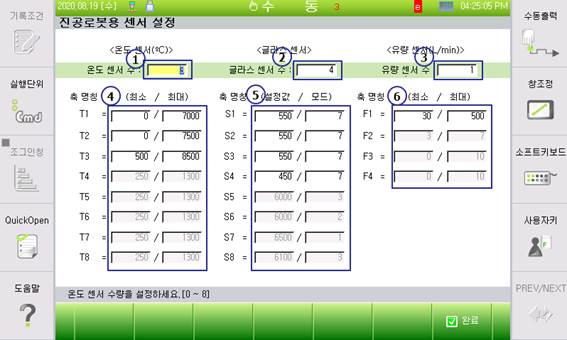
图3.2 传感器设置对话框
3. 项目说明及设定值范围
1 温度传感器的数量
è 设置范围:0 ~ 8
2 光纤传感器的数量
è 设置范围:0 ~ 8
3 流量传感器的数量
è 设置范围:0 ~ 4
4 温度传感器的上限值/下限值
- 具体范围根据温度传感器类型的不同而不同
表3‑1 按温度传感器类型分类的范围信息
温度传感器类型 | 温度范围(℃) |
K, J | -100.0 ~ 500.0 |
T | -100.0 ~ 400.0 |
R | 0.0 ~ 1500.0 |
5 光纤传感器的设定值及传感模式
- 具体范围根据传感模式的不同而不同
表3‑2 按光纤传感器类型分类的范围信息
传感模式 | 说明 | 设置范围 |
1 | High-Speed | 50 ~ 4000 |
2 | Fast | 50 ~ 4000 |
3 | Reduce | 不启用 |
4 | Standard | 50 ~ 4000 |
5 | Standard Fine | 不启用 |
6 | Long | 50 ~ 8000 |
7 | Ultra-Long | 50 ~ 9999 |
8 | Hyper | 50 ~ 9999 |
6 流量传感器的上限值/下限值
è 设置范围:-1,100 ~ 1,100 (l/min)