10.5.6.4. LoadAIn (仅可在LCD Handling无走行队列机器人上使用)
10.5.6.4. LoadAIn (仅可在LCD Handling无走行队列机器人上使用)
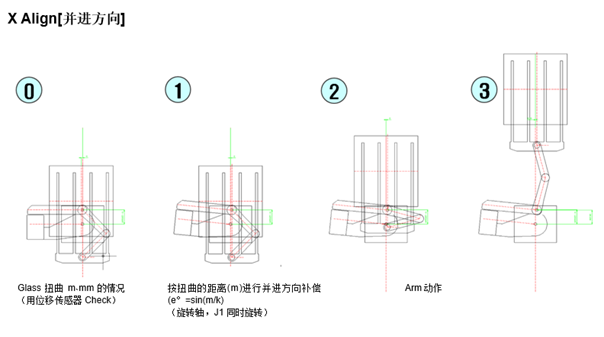
说明 | 仅限LCD Handling无走行队列机器人,在计算TH轴、R(L)轴、RA(LA)轴的补偿量时可以使用输入Load With Alignment command执行的X队列量。 | ||
语法 | LoadAln <Delta_X, iRorL, Offset_Arm_TH, popValue, DeltaTheta_TH , DeltaTheta_RL, DeltaTheta_RALA > | ||
参数 | Delta_X | X方向Glass位移量 | (mm) |
iRorL | 选择上下Hand | (mm) | |
Offset_Arm_TH | 从TH轴到Arm的距离 | (mm) | |
popValue | 出发的Step的Pose(Load Wait) | Pose参数 | |
DeltaTheta_TH | 为了队列,反映到TH轴上的补偿量 | (deg) | |
DeltaTheta_RL | 为了队列,反映到R(L)轴上的补偿量 | (deg) | |
DeltaTheta_RALA | 为了队列,反映到 RA(LA)轴上的补偿量 | (deg) | |
例子 | LoadAln V![327+V%[8],V%[8],V![323],P[2321],V![318],V![319],V![320] | ||