10.5.6.5. UnloadAIn (仅可在LCD Handling无走行队列机器人上使用)
10.5.6.5. UnloadAIn (仅可在LCD Handling无走行队列机器人上使用)
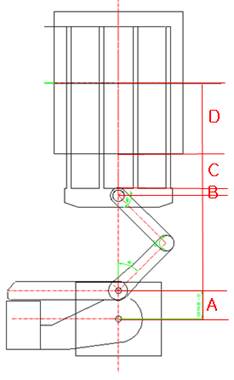
A: 从TH轴到Arm中心的距离
B: 从Hand中心到叉托架末端的距离
C: 从叉托架末端到Glass末端的距离
D: Glass的 1/2大小
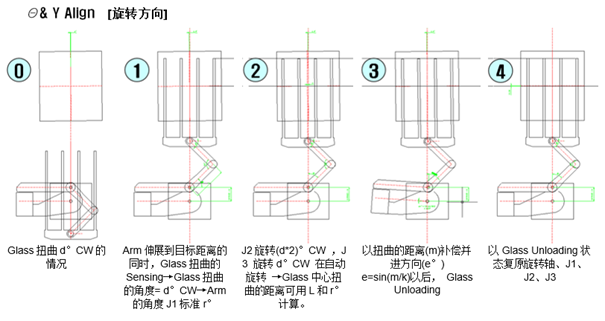
说明 | 限LCD Handling无走行队列机器人,在执行Unload With Alignment command时,可在计算TH轴、R 或L轴、RA轴或LA轴的补偿量时使用。 | ||
语法 | UnladAln <InTheta, InY, RorL, Offset_Arm_TH, Offset_ForkBracket, Offset_Hand , Offset_HalfGlass , Theta_TH , Theta_RL, Theta_RALA> | ||
参数 | InTheta | 返回Theta的Glass位移量 | 位移量 (rad) |
InY | y方向Glass位移量 | 位移量 (mm) | |
RorL | 选择上下Hand | (0:R, 1: L) | |
Offset_Arm_TH | 从TH轴到Arm的距离 | (mm) | |
Offset_ForkBracket | 从Hand中心到叉托架末端的距离 | (mm) | |
Offset_Hand | 从叉托架末端到Glass末端的距离 | (mm) | |
Offset_HalfGlass | Glass的大小 | (mm) | |
Theta_TH | 为了队列,反映到TH轴上的补偿量 | (deg) | |
Theta_RL | 为了队列,反映到R(L)轴上的补偿量 | (deg) | |
Theta_RALA | 为了队列,反映到 RA(LA)轴上的补偿量 | (deg) | |
例子 | UnloadAln LV2!,V![326],V%[8],V![323],V![340],V![343],V![344],V![318],V![319],V![320] | ||